- iPhone topik
- Android alkalmazások - szoftver kibeszélő topik
- Drága bluetooth tagek olcsóbb alternatívái (MiLi MiTag, LiTag, OTAG, stb.)
- Huawei P30 Pro - teletalálat
- Fotók, videók mobillal
- Megtartotta Európában a 7500 mAh-t az Oppo
- Samsung Galaxy A54 - türelemjáték
- Így változik a Galaxy A37 és A57 kamerája
- Milyen okostelefont vegyek?
- Honor Magic6 Pro - kör közepén számok
-

Mobilarena
Arduino hardverrel és szoftverrel foglakozó téma. Minden mikrovezérlő ami arduinoval programozható, és minden arduino program, board, és hardverrel kapcsolatos kérdések helye.

Új hozzászólás Aktív témák
-
Persze, hogy nem okoz gondot, úgy kell összerakni.
A linkelt robot hidd el, minőségi anyagból van, ugyan nem Lego minőség (ami egyébként meg sem közelíti a 10-20 évvel ezelőtti anyagminőséget...), de majdnem ott van, és az általam eddig kézben fogott kínai Lego másolatokat magasan veri. -
Neem
 Én nagyon szívesen összerakom, csak nem tudom mennyire ütköznék kompatibilitási gondokba, hogy nem passzol pl egy motor a lego elemekhez, emiatt eléggé elcsúnyítaná az egészet. Főleg akkor, ha az a lego nem is vezérelhetőre lenne tervezve hanem csak egyszeri összerakásra, így nem férne el egy motor, egy esp32 és egyéb meghajtó áramkörök helyhiány miatt.
Én nagyon szívesen összerakom, csak nem tudom mennyire ütköznék kompatibilitási gondokba, hogy nem passzol pl egy motor a lego elemekhez, emiatt eléggé elcsúnyítaná az egészet. Főleg akkor, ha az a lego nem is vezérelhetőre lenne tervezve hanem csak egyszeri összerakásra, így nem férne el egy motor, egy esp32 és egyéb meghajtó áramkörök helyhiány miatt.Amit küldtél sajnos nem olcsó, emellett jóval másabb mint egy lepin wall-e, kevésbé tűnik minőséginek.
Összefoglalva azért gondolkoztam el egy már motorizált mozgó lego/lepin eszközön, mert ott már ki van alakítva a motor és meghajtás. De te azt mondod, hogy egy sima összerakásra tervezett verziót is simán át lehetne alakítani úgy hogy a helyhiány ne okozzon gondot még akkor is, ha nem asztal méretű porsce-ben gondolkozok 100 ezer Ft-ért, hanem csak egy kisebb pl. wall-e vagy hasonló méretben?
-
válasz
 MineFox54
#10494
üzenetére
MineFox54
#10494
üzenetére
Azt nem írtad, hogy 0-10V közötti analóg jelet kellene küldeni. Ez alapján én is egy jól kiszámolt RC tag + tranzisztor megoldásra szavazok (plusz 10V-os táp) PWM meghajtással, de analóg elektronikai kérdésekben talán itt jobban tudnak segíteni.
(#10495) MineFox54: igen, ez jónak tűnik. V2 helyére menne az arduino kimenetről a pwm jel.
-

MineFox54
őstag
Sziasztok!
Arduino kimeneteiből kellene 0-10V-ot varázsolnom, egy ilyen eszköz bemeneteit kellene vezérelnem.
Ha jól értelmezem, egy 2x erősítésű non inverting műverősítős kapcsolásra, és egy alulvágó szűrőre lenne szükségem. Ezeknek a megtervezésében tudnátok segíteni?Köszönöm!

-
-
válasz
 Teasüti
#10489
üzenetére
Teasüti
#10489
üzenetére
Miért, az usb vezérlő chip is csak egy mikrovezérlő.

Én ilyen dolgokat, ha nem otthon vagyok, a telefonommal szoktam megoldani, OTG kábel + kártyaolvasóval. Mondjuk én csak a telefonomban lévő SD-ről mentek pendrive-ra, de az elv hasonló.
Az említett raspi zero-nak van mass storage módja, amivel ha gépre kötöd, pendrive-ként viselkedik, ha meg hdd-t kötsz rá, meg lehet oldani egy automatizált script-tel, hogy át mentse rá a tartalmát, mindezt akár egy powerbank-ről. De ez itt eléggé off téma. -

Teasüti
nagyúr
válasz
 MrChris
#10487
üzenetére
MrChris
#10487
üzenetére
Arra a sebességre én is kíváncsi lennék. Azért szerintem mikrokontrollerrel kicsit meredek lenne felvenni a versenyt egy usb3.0-ás eszközzel.
(#10488) aryes
A hordozható hdd backup funkción ötletelünk egy másik topikban, de egyelőre a tablet/ultrabook öszvér megoldás áll nyerésre. Integrált kártya olvasós külső hdd-ből eddig csak a WD Passport jött fel, meg hdd nélküli usb hub-os hordozható routerek, amik szintén tudják ezt a funkciót (telefonos segítséggel, wifi app-on keresztül).
Nos leszámítva azt, hogy a WD túl van árazva, a közös gyenge pontjuk ezeknek, hogy tetű lassúak (másfél óráig tart egy 64 gigás SD kártya lemásolása, ami vicc). Olyan 80 MB/s már barátságos tempó lenne, az UHS-I sebesség osztályt kellene megcélozni. UHS-II egyelőre még leányálom.
Úgy 10-15 éve egy rakás ilyen eszköz volt a piacon, de úgy tűnik kihaltak. -
válasz
MrChris
#10487
üzenetére
Én erre raspberry pi-t használnék. Egy zero kb. akkora, mint egy arduino nano, és nem sokkal drágább, mint egy eredeti uno board (használtan meg kb fillérekért beszerezhető). Hátránya, hogy kell hozzá egy otg usb hub, ami miatt némileg elveszíti a fenti méretbeli előnyét. Amúgy létezik hordozható hdd beépített sd backup funkcióval, az nem lenne jó? Vagy az építés a lényeg?
-
Ha jól értem, te olyat szeretnél, hogy legyen mellé még csomagolva valaki is, aki össze is rakja?
![;]](//cdn.rios.hu/dl/s/v1.gif)
Miért nem raksz össze saját tervezésű valamit? Az általad linkelt videókon még csak nem is Lego motorok vannak, szóval gyakorlatilag bármely, technic elemekből álló jármű alkalmas lenne a feladatra.
Ugyan nem Lego, és drágább is, mint 10ezer, viszont ajánlom neked ezt a Wall-e kinézetű robotot. Csak össze kell rakni (max 30perc) és egy remek grafikus felületen már lehet is programozni (legalábbis a 6 éves fiam már remekül boldogul vele) , Android vagy iOS alatt. Csak azért ajánlom, mert kettőt is vettem belőle a tavalyi akcióban, és fantasztikus minőségi cucc! Sajnos a látszattal ellentétben nem kompatibilis a Lego technic elemekkel.
Az első linkelt videó nagyon elgondolkodtatott, hogy minden eddigi lego motorizálási feladatnak rosszul álltam neki, mert az a nema8 stepper olyan, mintha maga a Lego találta volna ki, annyira illik a Lego mellé.
 Asszem be is szerzek párat.
Asszem be is szerzek párat. -
Valami kész lego/lepin járműre gondoltam, amit át lehetne építeni esp-t felhasználva valamivé
Mondjuk telefonról nyomkodni az irányokat, vagy automatizálni magától menjen. A vázát adná a lego/lepin, a motorok és a felfogatás is adott lenne, így könnyen átépíthetővé válna és ráépíthető lenne a vezérlő, ami ESP32. -
válasz
 tvamos
#10466
üzenetére
tvamos
#10466
üzenetére
Találtam az uln chipeknél sokkal cizelláltabb megoldást a ledek meghajtására.
Van itthon TB6612FNG breakout boardom, ami egy dual H-bridge motor driver. Mivel a ledeket úgyis csak egy irányba lehet meghajtani, ez azt jelenti, hogy 4db ledet tudok rá kötni, az standby lábra pedig mehet a 38kHz jel, és kész is az infra meghajtású soros port.
Az adatlapja szerint 100kHz-ig lehet hajtani, és a minimum tápfeszültség 2,5V (ezért is rendeltem, ilyen van az arduino motor shield v2-n is, ami nagyon jól működik). -
-
Na úgy néz ki mégsem kell újra feltalálnom a meleg vizet.

Addig olvastam, amíg kiderült, hogy a mintának tekintett Lego Spybotics egyszerű soros kommunikációt használt, 4800baud sebességgel, 72kHz-es infra jelre ültetve, nem a távirányítóknál használt protokollt. Tehát elméletileg 1 hardveres + 2 szoftveres serial meg is oldja a 3 infra vevő egyidejű használatának problémáját. Legalábbis a lib leírása szerint az avr software serial-lal szemben az esp változatnak nem okoz gondot két példány egyidejű működése.
Ráadásul a küldés is leegyszerűsödik (legalábbis a kód része), és nem kell használnom azt a hatalmas és komplikált irlib-et, ami nem is kimondottan erre való.
Viszont ahhoz, hogy a soros kimenetet tudjam használni, kelleni fog egy AND kapu, vagy egy hasonló működésű logika + egy 38kHz pwm-met kell valahogy előállítani. -
válasz
tvamos
#10475
üzenetére
De én nem a visszavert jelet akarom dekódolni! Az egyik roboton lesz az adó, a másikon a vevő.
Ha különböző frekvenciájú ir vevőkkel különböztetném meg a robotokat, akkor nem tudnám bővíteni a rendszert, vagyis nem tudnék kettőnél több robotot építeni. Lehet, hogy nem is fogok soha, de azért a lehetőséget szeretném meghagyni rá. -

tvamos
nagyúr
Igy mukodik: [link]
"Hát mivel ahogy írod, analóg jelerősséget nem lehet mérni az ir receiver kimenetén, azt találtam ki, hogy fordítva ülök a lóra. A jeladó erősségét tudom (legalábbis remélem, hogy tudom valahogy) változtatni. Egymás után több kódot küldök, egyre csökkenő intenzitással és a küldött kódba mindig beleírom, hogy az éppen milyen erősséggel lett kiküldve."
Ezt nem lesz konnyu kalibralni, mivel fugg a target objektum meretetol, meg a szinetol is, sot, a feluleti minosegetol is. Naggyon nehez dolog lesz... remelem, megosztod, ha sikerul, mert nagyon erdekelne!
Naggyon nehez dolog lesz... remelem, megosztod, ha sikerul, mert nagyon erdekelne!En probabol csinaltam egy olyan szkennert, hogy egy model szervora raktam a Sharp szenzort. (Ahogy az ultrahangosat szoktak rakni...)
Apropo... az lehet, hogy neked is menne, hogy egy ultrahangos szenzor, meg egy 38kHz infra van fenn, es mar kesz is. Ez olcso is, meg keveset kell barkacsolni.
Nezz csak ide: [link]
Letezik tobb freki, az talan eleg lenne kodolni a kulonbozo eszkozoket, es akkor konnyu megkulonboztetni is a kulonbozo robotokat. Oke, hogy kell penzt kolteni, de nem kell annyit programozni. Az egyik robot mehet 38kHz-en, a masik meg 56kHz-en. -
válasz
tvamos
#10472
üzenetére
"Hogy akarod a jelerosseget kiolvasni? Nekem ez nem ment. Vagy volt jel, vagy nem."
Hát mivel ahogy írod, analóg jelerősséget nem lehet mérni az ir receiver kimenetén, azt találtam ki, hogy fordítva ülök a lóra. A jeladó erősségét tudom (legalábbis remélem, hogy tudom valahogy) változtatni. Egymás után több kódot küldök, egyre csökkenő intenzitással és a küldött kódba mindig beleírom, hogy az éppen milyen erősséggel lett kiküldve. Úgy működne, mint a GPS rendszer, csak ott ugye az időkódot küldi a műhold és az eltérésből számolja a vevő a távolságot, én meg a jelintenzitást küldeném. A távolságot meg úgy lehet belőle kiszámolni, hogy ha a vevő oldalon sikerült a leggyengébb adást is venni, akkor az adó közel van (ehhez kéne valahogy elérni, hogy csak pár cm legyen a hatótávolság). Ha csak a legerősebb adást sikerül venni, akkor meg a szoba másik felén van az adó. A többi meg háromszögelés kérdése.
Természetesen tudom, hogy ezzel nem fogok tudni cm-es pontosságot becsülni, de ez az említett Spybotics rendszerben is csak úgy van, hogy az ellenfél közel van, távolabb van, vagy valahol előttem a távolban, az irányt is kb 30°-os pontossággal tudja megmondani, de ha nekem ilyen pontosságot sikerülne elérni, akkor már nagyon örülnék neki."Erzekeloket akarsz fejleszteni, vagy az eszkoz lemasolasa a cel, vagy mi az, amit szeretnel pontosan?"
Az eszközt szeretném lemásolni."Sharp tavolsag szenzor nem jo neked? Azzal tudnad a tavolsagot."
Tudom, hogy ilyen létezik, de nem jó, mivel nem egyszerűen távolságot akarok mérni, kódot akarok elrejteni a mérőjelben, amivel lehet azonosítani, hogy ki van előttem, esetleg még azt is, hogy felém néz és próbál bemérni, vagy éppen háttal van nekem. -
tvamos
nagyúr
"A 3 beérkező jel erőssége közti különbségből számolnám a jeladó irányát a vevőhöz képest. Van rá vmi ötletetek esetleg?"
Hogy akarod a jelerosseget kiolvasni? Nekem ez nem ment. Vagy volt jel, vagy nem. En valtottam LDR-re,
es tettem ele IR szuro foliat. (Mondjuk ilyenem volt.) Amugy lehet, hogy megy ez folia nelkul is...Rosszul emlekeztem, vegul nem volt folia, mert mukodott folia nelkul is. De mondjuk az neked nem jo, mert gondolom olyasmire kell, ahol a kulso feny bezavar. Akkor nem tudom."Azt az ábrát sajnos nem tudom értelmezni."
Nem baj, az a lenyeg, hogy a duty cycle-t tudod allitani, nem kotott az erteke.(#10465) aryes válasza _q (#10464) üzenetére
Nem pontosan ertem a feladatot... Erzekeloket akarsz fejleszteni, vagy az eszkoz lemasolasa a cel, vagy mi az, amit szeretnel pontosan?Sharp tavolsag szenzor nem jo neked? Azzal tudnad a tavolsagot. [link] Nekem ez bevalt. Van mogotte tudomany...
-
válasz
tvamos
#10466
üzenetére
Azt az ábrát sajnos nem tudom értelmezni.

Az ir remote lib-ben viszont láttam, hogy lehet duty-t állítani, lehet előbb azt fogom kipróbálni.
Az uln2003 csak úgy jött a képbe, hogy abból van otthon, nem kell venni. Az ir dióda meghajtásakor nem lenne probléma a feszültségesés, legfeljebb az előtét ellenállás számolásánál kell majd figyelembe venni.
De arra még mindig nincs ötletem, hogy hogy olvassak egyszerre 3db ir receivert. A 3 beérkező jel erőssége közti különbségből számolnám a jeladó irányát a vevőhöz képest. Van rá vmi ötletetek esetleg? -
-
tvamos
nagyúr
A fig. 8-on tlalsz PWM duty cycle-t a burst-hoz, ennel jobb utalast meg nem lattam arra, hogy milyen min. / max. kitoltest adhatsz.
Azert egy TO-92, vagy SOT-323 tokos MOSFET sokkal kisebb, mint egy ULN2003. Arra azert vigyazz, hogy annak az IC-nek eleg nagy a maradek feszultsege. (Mivel darlingtonok vannak benne.) Erdemes inkabb ULN2003V12-t hasznalni, annak kicsi. (N-FET van benne, nem BJT.)
Ez a frekvencia elhangolasos jatek nem hangzik tul jol. De mondjuk miert ne probalnad ki?!.. -
Nem a dolog egyszerűsége, hanem pont a bonyolultsága miatt gondoltam.
Van a LEGO Spybotics rendszer, jó régi, az eredeti Mindstorms-szal egy idős. Az egyik tulajdonsága, hogy ha van két ilyened, meg tudják egymást keresni infra sugárzók és vevők segítségével, és le tudják egymást lőni. Gyakorlatilag lézerharc, robotokkal.
Érzékeli a másik robot irányát és távolságát. Hátránya, hogy nekem csak egyet sikerült szereznem, csak soros porton át lehet programozni, és csak egy fény és egy ütközésérzékelőt lehet rá tenni, ami eléggé lekorlátozza a lehetőségeket.
Na ilyet szeretnék csinálni, rögtön kettőt is, csak wifi-n keresztül lehetne őket programozni és több szenzort szeretnék rá tenni, amivel a külvilágot érzékelik.
Most éppen ott akadtam el, hogy az esp ir lib csak egy ir receivert fog támogatni, szóval erre kellene még kitalálnom egy multiplexert, amivel egy pin-re 3db ir vevőt rá tudok akasztani... -
válasz
tvamos
#10456
üzenetére
Megnéztem, de nem láttam sehol, amit írtál. Viszont adtál egy nagyon jó ötletet!
A fig.5 alapján, ha a vivőfrekvenciát elhangolom, csökken a vevő érzékenysége. Ha 38kHz helyett mondjuk 26kHz-cel küldöm ki a jelet, a vevő érzékenysége 20% alatt lesz. Jól olvastam a táblázatot?
Ezt nekem pont kapóra jön.
Erre gondoltál egyébként pwm alatt?
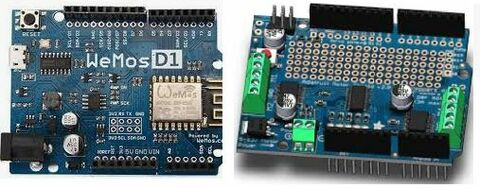
Nem avr, wemos d1 minivel szeretném, annak sajnos nem annyira terhelhetők a lábai, asszem 15mA a max. Szerintem az említett uln2003-al fogom meghajtani a ledeket, de csak akkora áramkorlátozó ellenállást fogok használni, hogy a LED ne menjen tönkre, így maximális lesz a hatótáv, és a frekvenciát fogom változtatni, nem az áramerősséget. -
tvamos
nagyúr
Azert bizonyos tartomanyban lehet PWM-ezni. A kollegam nezegette, hogy kb. 15%-80%-ig megy a dolog.
Itt az adatlapban a 3. oldalon is azt irjak, hogy lehet: [link]
Ez AVR? Mert az ellenallasokat annak a kimenetere siman ra lehet tenni. (Csak a labat, amin nem akarsz aramot hajtani, bemenetnek at kell allitani.) -

robohw
aktív tag
"Szeretnék csinálni egy olyan infra távirányítót, aminek a hatósugara szabályozható"
Ezt az adóteljesítmény változtatásával szokták megoldani.
Pl.: 1 LED vs 5 LED..Amit te szeretnél, az már nehezebben kivitelezhető. 10 cm hatótáv gyakorlatilag elérhetetlen. Legalábbis szerintem.
-
A másik ötletem az uln2003-el vezérelt "DAC", a 38kHz-es jelet pedig egy fet-tel vagy egy tranzisztorral vezérelném. Ez talán életképesebb ötlet lenne, teljesítmény szempontjából mindenképp, de túl sok pin kellene hozzá, márpedig az egészet egy wemos d1 minivel szeretném irányítani.
-
Sziasztok! Szeretnék csinálni egy olyan infra távirányítót, aminek a hatósugara szabályozható, például legyen mondjuk 3m és 10cm közt szabályozható. Normál esetben az infra LED fényerejét pwm-mel szabályoznám, de mivel itt eleve 38kHz-es jelet kellene pwm-mel modulálni, eléggé működésképtelennek láttam a dolgot.
Kitaláltam egy 4 bites DAC megoldást, ami egy 74hc595 chip 4 kimenetére kötött ellenállásokból áll, amiket párhuzamosan kötnék a LED egyik kivezetésére. Így megfelelően összeválogatva az ellenállásokat (pl 400, 200, 100 és 50 ohm) kb. 15 különböző áramerősségi szintet tudnék vele előállítani. A digitális jelet pedig a 74hc595 enable lábával tudnám küldeni.
Szerintetek működőképes az ötlet? Mekkora áramerősség kell egy infra LED-nek, hogy 3m-re tudjon sugározni? Ahogy utána olvastam, akár 1,5A is lehet pillanatnyi áramfelvétele (ennyit ír az adatlapja), tehát gondolom ennek oka van. A 74hc595 viszont 30mA-t enged a kimeneteken, és max. 70mA lehet az egész chip max árama. Mire lehet ez elég?
Ki fogom egyébként majd próbálni, de gondoltam előbb azért kikérem a véleményeteket.
Esetleg van valakinek jobb ötlete? 74hc595 és uln2003 (darlington array) chipjeim vannak itthon, azért ezekben gondolkoztam.
Köszi! -

Breaker
tag
válasz
 Tankblock
#10445
üzenetére
Tankblock
#10445
üzenetére
Szia!
Időközben leugrottam a Conradba és vettem R-eket
Nos a helyzet megoldódott. nem kisebb, hanem boven nagyobb ellenalasra volt szukseg. 65kOhm-al kotottem ra 5V-ra az ISET labat mind a kettonel. Es igy mukodnek, ráadásul a halvanyabb fenyeronel, nem vibral egyik led szegmens sem.
Viszont nem jon ki a matek, valamit nem latok at de nem a datasheet szerinti áram folyik az IC-k lábain.
A szegmens lábakon 0.6V feszultség van és 2.6 mA. A LED papirjai szerint a forward voltage 1.95V és 30mA kell a labakra, igaz ezek szeirntem a maximum fényerőnél lehetnek.
Valamit rosszul olvasok vagy nem veszek figyelembe, de nagyon kevésnek tűnik ennyi nafta a mukodeshez.
Köszi
Üdv
Breaker -
#10444
 DrojDtroll
veterán
DrojDtroll
veterán
DrojDtroll
veterán
Sziasztok!
OV7670 kamerával próbálkoztatok már?
-

szuszinho
őstag
Sziasztok,
Miért nem olvassa ki folyamatosan a következő kód a hőmérséklet értéket, miközben, ha a cél hőmérsékletet változtatom, az működik?
Main rész:
void loop()
{
// this call interprets characters from the serial port
// its a very basic control to allow adjustment of gain values, and set temp
updateSerialInterface();
updateLCDInterface();
updateTempSensor();
// every second, udpate the current heat control, and print out current status
// This checks for rollover with millis()
if (millis() < lastPIDTime) {
lastPIDTime = 0;
}
if ((millis() - lastPIDTime) > PID_UPDATE_INTERVAL) {
lastPIDTime += PID_UPDATE_INTERVAL;
heatPower = updatePID(targetTemp, getFreshTemp());
setHeatPowerPercentage(heatPower);
}
updateHeater();
}K-hőelem rész:
#include"max6675.h"
int thermoDO = 8;
int thermoCS = 9;
int thermoCLK = 10;
float tc = 0.0;
float latestReading = 0.0;
const float offSet = 34.25; // MAX6675 + K thermocouple error
MAX6675 thermocouple(thermoCLK, thermoCS, thermoDO);
void updateTempSensor(){
tc = thermocouple.readFahrenheit();
}
float getFreshTemp() {
latestReading = tc - offSet;
return latestReading;
}
float getLastTemp() {
return latestReading;
} -
Breaker
tag
Sziasztok,
Két MAX7219 ICt hasznalok egy 16 szegmenses LED kijelzo vezerlesere. Az egyik a felso 8at a masik az also 8at. Az elso teljesen hibatlanul mukodik. jo a vezerles, jo a kabelezes is.
Azonban ha a masodikat is felfuzom a MOSI/SCK pinekre nem tortenik semmi. Fel sem villan a led also fele (a felso tovabbra is jol mukodik).
A papirok szerint az IC ISET lábát 9kOHM resistorral kell 5V-ra kotni, sajna a legkisebb ami itthon van az 20as, ezert ezt hasznalom, azon gondolkodtam hatha ez a gond. Allitolag a fenyerosseg vezerlesehez kell (amit a megfelelo regiszterben lehet beallitani). Egy masik lehetoseg hogy az arduino PIN ahonnan az egesz az aramelleast kapja (usbrol), nem tud annyi currentet felvenni. nade 2 IC és egy 16 szegmenses led csak nem teszi ki 400milliampert (amennyi a limit ha jol tudom a pin-en)A kerdesem az lenne hogy volt e mar valakinek ilyen problemaja vagy elso ranezesre mi lehet a logikai gond..?
Előre is koszonom
Üdv
Breaker -
#10436
 balintarduin
újonc
balintarduin
újonc
balintarduin
újonc
Sziasztok!
Korábban már a menürendszert sikerült elkészítenem, változókkal és amelyekben tömbökben tárolom a kiírt adatot. Most tovább lépni szeretnék, és egy olyan kérdésem lenne, hogy hogyan tudom megcsinálni azt, hogy beírok egy idézőjelbe előre beírt számot, pl,43 és ezt kiírja a kijelzőre, ahogy begépelem a 4x3-as membrános billentyűzeten és utána az ehhez a számhoz tartozó parancsot végrehajtja. Amennyiben nem írtam be ezt, vagy jót, akkor nem történik semmi.
És valahogy úgy gondoltam, hogy tömbökbe teszem az összes számot amire szeretnék cselekvést, és egy ifekbe beírkálom a számát, hogy ha ezt adom be neki, akkor az ahhoz tartozó függvényt, parancsot, (pl kapcsoljon be egy ledet) fusson le.Előre is köszönöm a segítséget!
-
Azokat használom amiket a thinsversen találtam:
[servo adapter]
arduino tartó
Plusz kínai lego koppincs motorok, de valahol láttam sima noname motorhoz is. -

brickm
őstag
válasz
 Pubszon
#10431
üzenetére
Pubszon
#10431
üzenetére
Jaja közbe összeraktam a képet, azért írtam rá csillaggal
Bocs, elsőre én rendes izzószálás/energiatakarékos ívkisüléses világításnál leragadtam
Azt a 200mA-t egyébként még rá is lehetne bízni a relére, valószínűleg sokáig jól elmenne vele, de ha már úgy is megcan a másik foglalatos relé, mégiscsak jobban fog mutatni, mint az ebayes Meg igen, az utólagos szerelhetőség se mindegy.kgymac
Ez temészetes, az volt a félreértés tárgya, hogy a relék szekunder kapcsain miért csak 150mA a terhelés, de megoldódott. -
Köszönöm! Hát a D9 meg D10 az máshol van mint az uno-n.
Az elgondolás az volt, hogy a servo motor megy a servo1-es csatlakozóra, meg lesz még 1-2 sima motor. (vagy csak 2 motor, servo nélkül)
Lego alkatrészekből készült távirányítós teherautó a cél. A motorok direktbe az arduino motorvezérlőre kötve,mert nem lego motorok. 3d nyomtatóval majd lesz nekik keret nyomtatva.Plusz ledek, első körben ennyi, aztán tervben volt még okorsítani kicsit, mondjuk ütközés védelem, vagy sávkövetés. De úgy látom ehhez nincs elég használható lába.A wemos alapból tud wifit, meg bluetoothot, ezért lett volna jobb, de alig van szabad pinje. Van uno-m is bluetooth modullal meg L298N-nel, abból már építettem 2 motoros "autót".
A múltkor motorvezérlő nélkül már simán tudtam a servo motort irányítani wemos-szal wifin kersztül, de a másik két motornak csak kéne valami vezérlő... 3x3,7V lipo cellákról menne.
Lehet a L298N jobb választás ebben az esetben.
Jön még egy ESP12e+L293 shield hozzá, azok kisebb helyen is elférnek. Ez is szempont lenne. -

Pubszon
veterán
válasz
 brickm
#10427
üzenetére
brickm
#10427
üzenetére
A legnagyobb kapcsolt fogyasztó, 6db 7W-os LED lámpa.
Tehát nagy áramot nem kapcsolnak, de akkor sem bízom rájuk hosszú távon.
Meg ha a 4-es modulon egy relé beszarik, cserélhetem az egész modult, köthetem ki az összes vezetékét, majd vissza, közben meg áramtalanítsak is.
Ilyenből van kb 30db, bontott, de mind hibátlan. És ugye ha cserélni kell is pofon egyszerű, pár másodperc. -
-

Janos250
őstag
válasz
Pubszon
#10406
üzenetére
Nem egy olcsó megoldás, de kényelmes. Én mostanában ezekkel játszom.
https://www.ebay.com/itm/Sonoff-T1-WiFi-RF-Panel-Touch-1-2-3Gang-Switch-Smart-APP-Remote-Timer-UK-EU-Plug/323323099082?hash=item4b478ef7ca:m:mMQyXvai39vS-ojsAMvugFQ:rk:80:pf:0ESP8266/1M van benne. Arduino alatt úgy programozható, ahogy csak akarjuk, de a "Tasmota" rendszer is nagyon kényelmes, szintén Arduino alatt viszem fel az első variációt, utána OTA (azaz WiFi-n keresztül) lehet frissíteni, változtatni. Célszerű hozzá valami legolcsóbb lapra (valamelyik pi, vagy hasonszőrűek, vagy egy olcsó TV box) felrakni egy Mosquitto ("visszhang", jel ismétlő, szétosztó) szervert, aminek ha üzenetet küldünk bárhonnan (pl. az előbbi kapcsoló, telefon, internet), az továbbítja a megfelelő eszközhöz. Például kapcsolja a kapcsolót. Aztán, ha belekóstolunk az ízébe, akkor jöhet mindenféle egyéb szenzor, Sonoffok, miegymás. Ha még jobban megtetszik, akkor továbbléphetünk, valami okosotthon vezérlő szoftver felé, és akkor már teljes az örömünk.
-
válasz
 Victoryus
#10418
üzenetére
Victoryus
#10418
üzenetére
Hogy jön a szervó motor a motor shield-hez? A motor shield v2-n lévő szervó csatlakozók ha jól emlékszem csak az uno bizonyos pin-jeit (D9,D10) duplázzák meg úgy, hogy van mellette 5V meg GND, tehát nem a rajta lévő chip vezérli, amit i2c-n tudsz elérni, hanem a megfelelő pin-eket össze is kell kötni, és kell egy servo library is, ami wemos kompatibilis. Ha wemos-ra kötöd az uno shield-et, gondolom jumper kábelekkel, akkor bármelyik szabad pin-t rákötheted. Esetleg a digitális kimenet logikai szintje okozhat gondot, hogy csak 3v3, de szerintem a legtöbb szervónak ez elég.
Ja és persze kell neki kívülről 5V táp.
Úgy is mondhatnám, hogy szervó vezérléshez egyáltalán nincs szükség a motor shield-re, csak praktikus a csatlakozó miatt. -
brickm
őstag
válasz
brickm
#10419
üzenetére
Bocs, a szerkesztési időből kifutottam, de egy gondolatébresztés:
Ha lenne egy fölös 12 vagy 24-es segédtápod, meg zselés akkud, kiegészíthetnéd a rendszert egy emergency irányfénnyel.
Nálam úgy néz ki a dolog, hogy ha áramszünet van a riasztó PIR-ek etejére szerelt nagyobb SMD led felkapcsol, így minden helyiségben van legalább egy fényforrás.
-
-
Wemos d1 r2 együtt tud működni a motor shield v2-vel? Egy servo motort próbálok életre kelteni a servo1-es csatlakozón, de nem igazán csinál semmit se. Vagy megint belefutottam abba, hogy túl sokban eltér az uno-tól a lábkiosztása...
-

#94180096
törölt tag
(#10403) gyapo11:
Ahogy olvastam a galileo nagyon lassan kezeli le a megszakításokat.
Most nincs előttem a forrás (ha kell elő keresem) de ahogy láttam az egyetlen ötlet a megoldásra a fastGpioDigitalRead függvény. Ez lényegesen gyorsabb olvasást tesz lehetővé [link], igaz ez nem megszakítás..(#10404) weiss:
A mintavételt egy külön shield végzi. [link]
Ez elvileg tud 44.1 khz-en mintát adni.(#10405) robohw:
Köszi a linket, megnéztem. Csak azt nem tudom hogy hogyan használjam ezt a meglévő hw-hez?Betettem a fastGpioDigitalRead függvényt a loopba egy while(1) ciklusba, és amikor az órajel generátor adja a jelet csinálok valamit. Most pont egy mérést, vagyis elszámolok 44100-ig aztán mérek, kiírok. 1,003 sec külömbséggel fut le a két mérés egymás után. Ez annyira nem tökéletes de akár jó is lehet. Valszeg a soros porton történő kiírás miatt nem lesz pont 1 sec a futási idő.
-
Pubszon
veterán
válasz
brickm
#10415
üzenetére
Ez mit akar jelenteni?
A kimeneten jelenleg az olcsó 4 relés, optocsatolós modulok vannak, de szeretném azokat is a végleges felállásnál lecserélni 24V-os ipari relékre, amik már meg is vannak.
A mega és a 24V-os relék közé kellene valami korrekt megoldás, én erre gondoltam.Így akkor jó lenne az egész, igaz?
-
Pubszon
veterán
Köszi srácok a jó ötleteket.
Úgy néz ki, hogy akkor optocsatolóval lesz megvalósítva a bemenet.
Erre a modulra gondoltam.Továbbra is a 24V pozitív ága lesz kapcsolva, a bemeneteket felhúzom szoftveresen, kapcsoláskor pedig lehúzza GND-re az optocsatoló.
Jó az elképzelés és hosszú távon is jó lesz? -
brickm
őstag
válasz
Pubszon
#10411
üzenetére
Mondom, hogy rossz a logikád.
Az antenna ellenálláson keresztül kapcsolódik a földre, de mivel esik azon az alsó tagon is X volt feszültség, az megy a bemenetre. Egy ilyen kábel induktívan össze tud szedni a falban 80-110V zavarjelet, aminek bár teljesítménye nincs, a mikrovezérlőd ki\bemenete érzékeny rá. Mint azt a példád is mutatja. (Egyébként ha csökkented az osztódat azzal csak a 24voltot terheled le jobban, lehet, hogy most épp megszűnik ez a hibajelenség, de ez egy rossz megoldás, minden szempontból)
A feszültségosztós húzás amúgy is egy iskola példa a "hogyan ne..." kategóriában.
Mit zársz rövidre?
Fogsz egy optocsatolót, aminek az A oldalán lesz a kapcsolt 24volt meg a saját GND-je, ami most ment az osztód tetejére, meg a közös pontra, a B oldaalára meg rákötöd a bemenetedet meg a mikrovezérlő GND-t, a bemenet pedig még direktbe felmegy egy ellenállással a tápra. Semmi nincs rövidre zárva, csak a bemenet, annak meg úgy kellene lenni most is.... -

gyapo11
őstag
válasz
Pubszon
#10411
üzenetére
Ha egy ellenállás le- vagy felhúzza a bemenetet, az addig fix, amíg rá nem kötsz egy drótot, mert a drót viszi be a zavart. Ha árnyékolt a drót és minél rövidebb, minél kisebb az ellenállás a táp felé, illetve kis induktivitású kondi testeli, akkor jobb a helyzet.
Itt software-ből is lehet ügyeskedni, mert ha beérkezik a megnyomás/bekapcsolás jele, akkor elég várni pár tíz ms-ot a prell miatt, majd nézni, hogy folyamatosan aktív-e a jel még pár tíz ms-ig, ha igen, akkor nem zavarjel.
-
Pubszon
veterán
válasz
brickm
#10410
üzenetére
De az antenna egy ellenálláson keresztül megy, majd egy másik ellenálláson keresztül csatlakozik a GND-re.
Így is össze szed jelet, ezért az egyik megoldásom az ellenállásokat csökkenteni a feszültség osztón.
Fix GND-re nem hozhatom, mert akkor minden kapcsoláskor a 24V-os tápot rövidre zárnám.
Ezek az impulzus jelek milyen hosszúak lehetnek vajon?
-
brickm
őstag
válasz
Pubszon
#10409
üzenetére
Hogyne lebegne. A feszültségosztó ott van a bemeneted mellett. Ebben adott két ellenállás, amiből az egyik a föld felé mutat, a másik meg egy antennára. Ha az entenna felől jön egy gerjesztett hullám, az osztód mivoltából ott 0-nál mindenképp nagyobb, akár 3-5V, vagy még nagyobb impulzus is keletkezhet, aminek természetesen teljestménye nincs, de egy arduino bementét kapcsolhatja.
A bemenet akkor nem lebeg, ha fix potenciálon nyugszik, legyen az logikai 0, vagy 1. Tehát gnd, vagy táp. Minden köztes állapot lebegés.
-
-
Pubszon
veterán
Üdv.
Tesóm lakásának világítását egy Arduino Mega 2560-al vezérlem.
A villanykapcsolók nyomó kapcsolók és a +24V szálat zárják nyomáskor, ami utána egy feszültség osztóba megy, ahonnan kb 4.8V-ot kap a Mega bemenete.
Van 16 relé és 22 kapcsoló.
Működik is minden rendben, a prellmentesítést is szoftveresen megoldottam.Viszont azt vettem észre, hogy ha gyorsan nyomkodom valamelyik kapcsolót, akkor random egy másik lámpa fel vagy épp lekapcsol, attól függően hogy mi az állapota. Ezt most kiküszöböltem, hogy minden kapcsoláskor 1000ms delay-t hagytam, de ez nem a legjobb megoldás.
Valami olyasmi lehet, hogy a kapcsolgatás miatt elektromos zaj keletkezik és amiatt kapcsol fel egy másik lámpa?
Hogyan tudnék ez ellen védekezni?
3 dologra gondoltam:
- Feszültségosztó 2 ellenállását arányosan csökkenteni (ezt a legnehezebb kivitelezni)
- A 24V-ot 16V-ra csökkenteni, így is jutna 3.2V a bemenetre, ami még magas jelszint
- Csak akkor kapcsolna fel a lámpa, ha a kapcsoló legalább 50 vagy 80ms-ig folyamatosan nyomva van, így kiszűrve a néhány ms-os jelet. (Egy átlagos egérkattintás 80-100ms)Bárminemű segítséget, tippet szívesen fogadok!

-
gyapo11
őstag
válasz
 #94180096
#10398
üzenetére
#94180096
#10398
üzenetére
Nem tudom milyen cpu-ra gondolsz, én a 328-assal próbáltam egy nagyon egyszerű ciklust, ami csak számol, és 100 kHz fölött valamivel futott le egy másodperc alatt. Szóval a 44 kHz-es megszakításban ha 2 utasításnál több van (egy inkrementálás és egy if volt nálam), akkor nem fog beleférni az időbe.
-
válasz
 szuszinho
#10401
üzenetére
szuszinho
#10401
üzenetére
A Vin bemenet mögött van egy 5V feszszabályzó, minimum 6,4V-ot kell rá adni, hogy stabil 5V-ot kapjon róla a lap. Akkor kell használni, ha 6,4-12V közti tápot szeretnél használni. Az 5V bemenetet nem védi semmi, vigyázz, hogy magasabb feszültséget, stabilizálatlan tápot be köss rá.


 utána nézek mennyibe kerülne valami kisebb, használható, faragható lepin. Mondjuk nem léptető motor, de van 2 kicsi távirányítós kocsikba is szerelt dc motorom, azt rá lehetne applikálni.
utána nézek mennyibe kerülne valami kisebb, használható, faragható lepin. Mondjuk nem léptető motor, de van 2 kicsi távirányítós kocsikba is szerelt dc motorom, azt rá lehetne applikálni. 









![;]](http://cdn.rios.hu/dl/s/v1.gif)
 Asszem be is szerzek párat.
Asszem be is szerzek párat.





 Naggyon nehez dolog lesz... remelem, megosztod, ha sikerul, mert nagyon erdekelne!
Naggyon nehez dolog lesz... remelem, megosztod, ha sikerul, mert nagyon erdekelne!






























Új hozzászólás Aktív témák
 ekkold
ekkold- Kerékpárosok, bringások ide!
- iPhone topik
- Luck Dragon: Asszociációs játék. :)
- Milyen videókártyát?
- sziku69: Fűzzük össze a szavakat :)
- Óvodások homokozója
- Samsung Galaxy Felhasználók OFF topicja
- Vezetékes FÜLhallgatók
- Epic Store Ünnepi Ajándékozás - 6. nap: Bloodstained: Ritual of the Night
- Motorolaj, hajtóműolaj, hűtőfolyadék, adalékok és szűrők topikja
- További aktív témák...

- Új! AKRacing Premium Master gamer szék
- AKCIÓ! Apple MacBook Pro 16 M4 Max 36GB RAM 1TB SSD macbook garanciával hibátlan működéssel
- magyar billentyűzet - 173 - Lenovo Legion Pro 7 (16IAX10H) - Intel Core U9 275HX, RTX 5080
- Eredeti Microsoft Windows 10 / 11 Pro OEM licenc Akciós áron! 64/32 bit Azonnali kézbesítéssel
- ÁRGARANCIA!Épített KomPhone i5 12400F 16/32/64GB RAM RTX 5070 12GB GAMER PC termékbeszámítással
Állásajánlatok

Cég: Laptopszaki Kft.
Város: Budapest

Cég: BroadBit Hungary Kft.
Város: Budakeszi