Hirdetés
- EarFun Air Pro 4+ – érdemi plusz
- Megérkezett a Google Pixel 7 és 7 Pro
- „Új mérce az Android világában” – Kezünkben a Vivo X300 és X300 Pro
- Milyen okostelefont vegyek?
- Google Pixel topik
- Pebble - az átgondolt okosóra
- Samsung Galaxy S25 - végre van kicsi!
- Fotók, videók mobillal
- Garmin Instinct – küldetés teljesítve
- Ekkor startol és ennyit gyártanak a Galaxy TriFoldból
-

Mobilarena
Amit érdemes tudni a Raspberry Pi-kről:
A legelső változat 2012-ben jelent meg. Pici, olcsó és nagyon alacsony fogyasztású, hobby-célú kártyagép. Felépítése ARM alapú, nem PC-architektúra, hanem kb. egy régi mobilhoz hasonló. Nagyon sok mindenre használható! A Linux-nak és a magas eladási mennyiségnek köszönhetően jelentős fejlesztőtáborral rendelkezik.

Új hozzászólás Aktív témák
-
#39724
 UberMutant
őstag
cog777
#39723
UberMutant
őstag
cog777
#39723
-
-

rikko
csendes tag
válasz
 cog777
#39475
üzenetére
cog777
#39475
üzenetére
HATALMAS KÖSZÖNET!!!
A winSCP nevű programot letöltve jól működik ahogy kell. Ha ezt tudtam volna régebben, akkor nem is vacakoltam volna a samba-val, mert így csak engedélyeznem kell az ssh-t aztán pakolhatom rá macska üzemmódban (tehát elég egérrel kattintgatni, nem kell parancssorozni) a dolgokat.
Elnézve a dolgokat szerintem szinte biztos, hogy a win10 a ludas, csak azt nem tudom, hogy hogy lehetne, minden biztonsági cuccát kilőni, mert szerintem akkor elérné.
-
válasz
cog777
#39296
üzenetére
Oda kell figyelni ezek szerint minden rendszer újratelepítésnél, hogy a konfigban át legyen rakva stabilra, mert akkor nekem is megy.
(#39297) sztanozs
Nekem az USB boot miatt stabilra volt rakva a bootlooder konfigban még május körül, ennek ellenére most hogy újratettem az augusztusi Rasbian OS-t, megint critical volt, mivel ez az operációs rendszerből jön, már mint a konfig. Tehát szerintem minden rendszer újrahúzásnál át kell írni ha valaki up to date stabil verziót szeretne használni, különben csak letölti a frissítést de nem települ. -
válasz
cog777
#39079
üzenetére
A start parancs elindítja, de csak amíg ki nem kapcsolod manuálisan vagy a következő újraindításig nem? Szerinetem azért kell az enable, mert azzal elindul és fut is folyamatosan amíg ki nem kapcsolod manuálisan.
Milyen paranccsot használtál, hogy következőleg is elinduljon magától ha újraindítod a rendszert?
-

V.Stryker
nagyúr
válasz
cog777
#38989
üzenetére
Kicsit érdekes. Csináltam scan-t, egyik scan-re az 5Ghz-es hálózatot látja, a másikban a simát, egyszerre a kettőt nem listázza.
Hiába van erős jele a 2.4-es hálózatnak, egyszerűen nem hajlandó hozzá csatlakozni, nem csinál semmit.
Az újraconfigurálásra írt, egy OK-t, utána csatlakozott az 5Ghz-es hálózathoz, de most míg ezt írom, lecsatlakozott megint. Offline.
Ha csatlakozik végre, kap ip-t és működik... ideig óráig.
A conf fileban ott mindkét hálózat, a jelszóval együtt. Próbáltam már törölni az 5g-st, restart, hogy utána hátha a 2.4-re ráveszi magát, de nem. -

atesss
addikt
válasz
cog777
#38955
üzenetére
Még a korábbi hsz-edből:
"Pythonban sima Timer megteszi hogy bizonyos idokozonkent futtat valamit."
Erre tudsz ajánlani konkrét kódot ?
Nézegettem már neten több félét, de van amit nem is teljesen értek, meg írnak az elcsúszás problématikájáról, stb.
Pl. itt láttam több megoldást is: [link]
Csak ezekhez már Threading is kell, stb. Ami mondjuk baromi hasznos lenne, csak még egyelőre nem annyira tiszta.
A 3. válasz (52 "szavazat"?) elég impresszív. Csak a yield-be is még bele kellene ásnom magam.
(Olyan kódot direkt nem akarok felhasználni, aminek a működését nem értem 100%-osan.)"ha gyorsitani szeretnel, akkor akar beteheted a /tmp-be, amit a ramba teszel tmpfs-re."
Na ez az amivel szerintem nem nagyon foglalkoznék. Akkor már ami időt ezzel töltök, azt a MQTT tanulására fordítanám, az egy sokkal előremutatóbb megoldás minden ilyesmire."MQTT pedig ha tobb alkalmazas kozott"
Igen, ez a cél. A középtávú két felhasználásom egyrészt okosotthonos eszközök, másrészt szabadulószobás vezérlőrendszer lenne. Utóbbiban kb. mindenki MQTT-t használ, nem véletlenül."Ajanlom az esp8266-ot,... "
Az is egy opció. De ha jelen esetben úgyis egymás mellett lennének, akkor nem annyira lényeges a Wifi. Akár egy RS232 is oké lenne, és az azért megbízhatóbb. És azt akár könnyen és olcsón meg tudnám csinálni optikailag leválasztva.
Ami az ESP-nek mégis az előnye lehetne, hogy akár szintén Python-ban (MicroPython) tudnám programozni, és nem kell "külön" az AVR-C-vel (illetve Arduino-val) foglalkoznom. -
atesss
addikt
válasz
cog777
#38951
üzenetére
Igen, részben tanulási célzattal is csinálom.
Persze úgy, hogy ezzel most azért alapvetően olyanokat akarok megtanulni, aminek a nem túl távoli jövőben hasznát is veszem. Pont ezért ilyen RTOS kategóriájú kérdésekkel nem nagyon van értelme foglalkoznom most (azon felül hogy esetleg érdekességként, röviden elolvasom)."En tovabbra is a monotonic orat hasznalnam kalkulaciora, pont erre van."
Igen, ezt írtad is, csak még nem néztem utána, illetve nem alakítottam át a teljes kódomat erre.
Addig a rendszeridő-alapú műveletekről való gondolatot vittük tovább. De ha jól megy a monotonic, akkor amúgy tényleg felesleges lenne a rendszeridő-alapúval ennyit foglalkozni."Viszont ha nem akarod, akkor irj egy szolgaltatast ami var addig amig nincs internet, majd kenyszeritsd ki az idoszinkronizaciot."
Na ez így már egy egész részletes leírás, ez alapján már akár ezt is meg tudom csinálni, köszi. Egyelőre csak a fájlon keresztüli menne. Vagy esetleg egy shell sciptbe lehetne az egészet beírni. És a feltételek végén (benne egy timeout-al, hogyha nem tudta x idő alatt szinkronizálni, akkor is továbbmenjen) meg ott van a python scriptem indítása.
Akár lehetne egy indítási paramétere (parancssori paraméternek hívják ezt?) a python scriptemnek, hogy sikerült-e az időszinkronizáció.
De később akarok majd MQTT-vel is foglalkozni (sőt, konkrétan elég komolyan számítok az MQTT-re, minél előbb).
A megfelelően működő, használandó ntp szolgáltatást meg majd max. kikísérletezem."Alternativakent, RTC-t kell hasznalni ha a logokban fontos a mp pontossagu ido."
Ahogy írtam, lesz olyan kiépítés, ahol lesz RTC, mert a perifériák miatt úgyis meglévő nyákra elfér, és nem egy nagy tétel árban sem.
De van ahol meg nem lesz, mert nem is lesz nyák a Pi-hez.
Ezért nem árt foglalkoznom az RTC nélküli megoldással, kitalálni/megtanulni egy jól használható megoldást arra is."Ha surun, akkor komoly megoldas kell. Ha par evente 1x akkor felesleges tul sok energiat belelolni hacsak tanulni nem szeretnel..."
Igen, ez is jogos.
Hát - most így a tanulás okán - ahogy írtam, az a fő kérdés, hogy milyen gyakran várható majd olyan feladat számomra, ahol egyáltalán használnom kellene.
Viszont ha már idő-alap: kisebb szervo és léptetőmotor vezérlés viszont abszolút előfordulhat. De az az érzésem, hogy ha ilyeneket akarok használni, akkor még ha nem is akarok nagyon pontos lenni, akkor is egy plusz, ezt kezelő HW lenne a jó megoldás (leginkább egy külön, kisebb AVR) a Raspberry mellé bekötve. -
atesss
addikt
válasz
cog777
#38940
üzenetére
Igen, ez jogos.
De a #38936-ben írt kódomban [link] azstrftime("%Y-%m-%d %A %H:%M:%S", localtime())
nem az Epoch-ot használja alapként ?
Azzal a különbséggel, hogy az oprendszer localisation -jét is beleszámolja, azaz - ha be van állítva a Magyarország - akkor mindig a megfelelő időzónában van, és állítja az időszámítást is. Így mindig a pontos helyi időt kapom.
"nagyobb idotavlatbol viszonylag pontos osszehasonlitasokat vegezzunk."
Nekem első körben arra kellhet a log, hogy tudjam mikor történt a hiba, össze tudjam hasonlítani a kamerák képével (ezt másodperc pontosan), tudjak beszélni az épp akkor dolgozó kollégával, stb. És ugye ő is a saját óráján ezt az időt "használja".
Második körben meg statisztikára (milyen gyakran fordult elő hiba összesen, pl. egy hónap alatt, illetve volt-e olyan hogy egy óra alatt nagyon sokszor).Az időszámítás miatti ugrálás viszont bizonyos esetekben tényleg gond lehetne...
Viszont az átállás ideje, az éjjel 3 óra az én esetemben abszolút üzemidőn kívül van, úgyhogy ez nem lesz gond most nekem.
Mondjuk máshol a LOG-ba lehet be kéne írni azt is, hogy egy óra-átállítás történt.time.monotonic() → floattime.monotonic_ns() → int
A felsőt én az eddigi time.time()-omhoz hasonlóan tudnám használni ?
Annyi, hogy jóval kisebb értékekről van szó. De a rendszerindítás után egy 15-20 sec úgyis biztosan el fog telni, mire elindul a python scriptem.
Mondjuk ezt akkor át kell gondolnom, mert asszem van ahol úgy adtam meg egy kezdeti értéknek (a program-induláskor) a time.time() visszatérési értékét, hogy az "Úgyis jó nagy lesz", és így - amíg nincs külön esemény, ami módosítaná ezt a változót - addig a "Jó nagy" miatt biztosan nem lesz igaz az egyik if szerkezetem. -
atesss
addikt
válasz
cog777
#38935
üzenetére
Ja és igen, most én is ezt az Epoch-os megoldást használom - a log kivételével mindenhol.
Pl. a legegyszerűbb ezek közül egy a kód működését/futását jelző ledet villogtató függvényem. Bár ugye ez pont nem annyira kritikus dolog, de most önálló példaként ezt tudtam egyszerűen leírni.SLOW_CYCLE_TIME = 1slow_time_previous = 0def run_flasher():global run_led_stateGPIO.output(RUN_LED, run_led_state)run_led_state = not run_led_state...# MAIN függvényslow_time_elapsed = time.time() - slow_time_previousif slow_time_elapsed > SLOW_CYCLE_TIME:slow_time_previous = time.time()run_flasher() -
atesss
addikt
válasz
cog777
#38935
üzenetére
Igen, van olyan része is a kódnak, aminél a pontos idő a fontos.
Jól mondtad, ez a log, a releváns része így néz ki most a programomnak:import timefrom time import localtime, strftime...# MAIN függvényTimeStamp_Failure_Left = strftime("%Y-%m-%d %A %H:%M:%S", localtime())print("A hiba ideje: ", TimeStamp_Failure_Left)with open(LOG_PATH, "a") as logfile:logfile.write(TimeStamp_Failure_Left)logfile.write(' - Hiba az A motornal (LEFT) \n')Hát annyi, hogy viszont egyelőre - Pi elindulásakor - a rendszeridő beállításához szükség van a netes szinkronizációra. (Van ugyan RTC modulom, de nem nagyon akarnám használni, csak ha nagyon muszály.)
De később meg ha már fut a Pi, felesleges.
Bár ok, elvileg ekkor nem is kellene már ugrálnia. -

t72killer
titán
válasz
cog777
#38861
üzenetére
Ok, de a probléma eleve onnan indult, hogy 2GB a RAM, ami elég hamar megtelik. Alternatívák:
1. ilyen célra 4GB-os pi-t vesz az ember = +20EUR +10EUR SD-karira.
2. kb 30€-ért veszel egy USB-s SSD-t: ezen ugyebár már helyed is bőven vanPersze a RAM gyorsabb az SSD-nél, de szvsz az is értelmes megoldás.
-
válasz
cog777
#38839
üzenetére
Ehhez még egy kis kiegészítő, hogy a
hdparm -Tt /dev/sda1paranccsal lehet tesztelni a sebességet
Ha hiányozna a csomag:
apt install hdparm -yNekem ezek az értékek jöttek ki, nem tudom ez esetben kell-e varázsolnom a linkelt cikk alapján:
Timing cached reads: 1400 MB in 2.00 seconds = 700.37 MB/sec
Timing buffered disk reads: 260 MB in 3.01 seconds = 86.47 MB/sec -
válasz
cog777
#38846
üzenetére
BUS1-re nekem is kiirja az uas-t. Egyébként a HDD-ről érezhetően gyorsabban bootol mint az SD kártyáról, akkor nálam valamiért jól működne az UASP? Ja és talán 1 perc alatt bebootol USB3.0-án.
SSD még nem jött amit rendeltem, bár ez alapján a teszt alapján nem is biztos van értelme használni: [link] Fájl és webszerver kivételével nem éri meg az SSD.
-
válasz
cog777
#38843
üzenetére
Na ilyenkor mi van
 ?
?/: Bus 02.Port 1: Dev 1, Class=root_hub, Driver=xhci_hcd/4p, 5000M
|__ Port 2: Dev 2, If 0, Class=Mass Storage, Driver=uas, 5000M
/: Bus 01.Port 1: Dev 1, Class=root_hub, Driver=xhci_hcd/1p, 480M
|__ Port 1: Dev 2, If 0, Class=Hub, Driver=hub/4p, 480MMiért van 2, miközben egy db HDD van csak rákötve a Pi4-re? Igaz azon van most egy root partíció és van külön egy adatoknak fenntartott partíció, de akkor meg mind a kettőnek uas-t kellene írnia, miközben most csak a Bus 2-re írja.
Illetve a másik. Mivel érdemes tesztelni, hogy ha már van UASP, akkor vajon ki is használja USB3.0-án van se vagy ti miből láttátok hogy lassú?
-

azbest
félisten
válasz
cog777
#38834
üzenetére
Notin amúgy használtam már zramot és zswap-et is. Tényleg tud segíteni. Azt érdemes tudni, hogy nem minden program támogatja azt, hogy ki-swappeljék. Az olyan programokon sajnos nem segít, bár ezek általában speciálisabb programok, szóval hétköznapi felhasználáskor nem lesz gond. Viszont az ingyenes virtualbox-ról kiderült, hogy nem támogatja, ezért minden igyekezetem ellenére sikerült out of memory-ba futni, amikor több vm-et futtattam párhuzamosan
Viszont a többi program nagyrészt ki tudott menni tömörített memória területre és több fért el akkor is mellettük. -
V.Stryker
nagyúr
válasz
cog777
#38777
üzenetére
Ssd már félre van téve erre a célra. Viszont ahogy néhány nyilatkozatot olvastam, mintha komolyan rámennének a 64 bites rendszerre a jövőben és ott már a 8gb memória talán kiadja.
Apropó! Miért USB3 csatira kötött SSD-vel tolják többnyire? Mennyivel lassabb egy USB3-as pendrive? vagy ott az ár/érték/tárhely hármas nem adja ki anyagiakban?
-
t72killer
titán
válasz
cog777
#38690
üzenetére
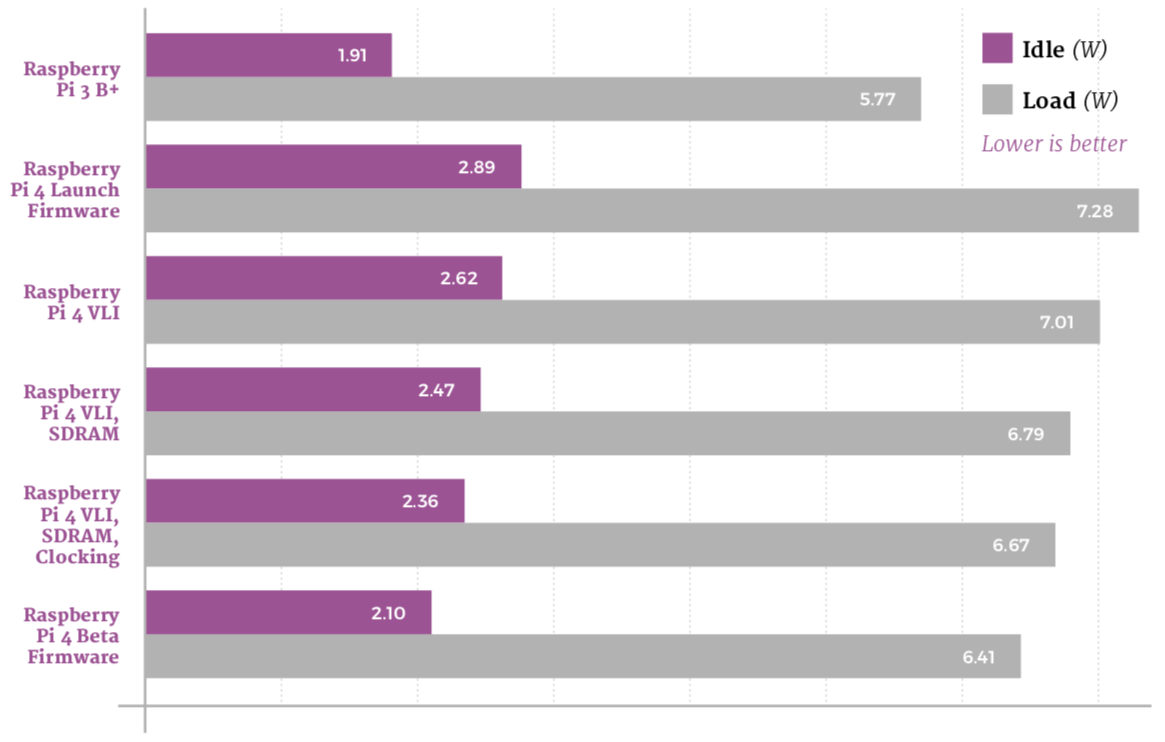
 , a melegedés, főleg miután ennek is berendeltem egy armor bordaházikót, nem téma, a fogyasztás, pláne idle-közeli viszont nagyonis. Előfordulna, hogy egy öregedő, névlegesen 70Wh-s powerbank etetné, amit nem mind1, hogy 1.x vagy 3W-al szívsz.
, a melegedés, főleg miután ennek is berendeltem egy armor bordaházikót, nem téma, a fogyasztás, pláne idle-közeli viszont nagyonis. Előfordulna, hogy egy öregedő, névlegesen 70Wh-s powerbank etetné, amit nem mind1, hogy 1.x vagy 3W-al szívsz.Bár az is lehet - miután a 3b+-t nem adom el - az ilyen helyre az öreget rakom be, némi kompromisszummal.
-
t72killer
titán
válasz
cog777
#38682
üzenetére
Hűtéssel-fogyasztással kapcsolatban: mostanra már akkor az itt emlegetett "béta firmware" az aktuális?
Egy ilyen, elméletben 4.8A-es autós töltővel is lenne etetve alkalmasint - vannak egész jó USB-C kábeleim, de őszintén még nem teszteltem őket, mennyi feszültség esik rajtuk, ha beindul a komolyabb fogyasztás.
-
t72killer
titán
válasz
cog777
#38661
üzenetére
, jól értelmezem, h a soros-oldalról akár 15v is ugrálhat rajta, a pi felől meg marad a 3.3? Érdekes, a konkrét cuccnál, amit linkeltem, cs 5V-ig írja, bár ezzel lehet a pi-oldalát értette  : "Support 3.3 V and 5V signal control and compatibility"
: "Support 3.3 V and 5V signal control and compatibility"#38662:<<
 , noigen. Nem dugjuk direkt 230V-ba se a pi-t
, noigen. Nem dugjuk direkt 230V-ba se a pi-t 
-
t72killer
titán
válasz
cog777
#38657
üzenetére
"This module features:
All the chips we guarantee are brand new imported industrial-grade chips, which can reach a distance of thousands of meters.
The ESD protection with plus or minus 15KV
3, chip driver is set rate, reduce EMI, and reduce caused by the improper matching cable terminal signal reflection, making the error-free signal transmission rate is as high as 500 KBPS.
A receiver that has a unit load of 1/4 is an impedance that supports multiple communication and allows for a bus that is connected to no more than 128 devices.
5, industrial-grade chips working temperature can reach to 40 ° to + 85 °.
6, this module can be hot plug, no other 485 chip heat plug is dead phenomenon.
The power supply is used with the tantalum electrolytic capacitor, and the double capacitor is used for high low-frequency power filtering
Using double transient suppression diode, the over-voltage protection performance is excellent
9, 10 Ω current protection resistance, patch designed to improve 485 signal integrity
It has terminals and welded lead holes, easy to debug and fixed wiring, and welding leads can improve the reliability of the signal
The RS485 and the TTL signal are all single-sided, ensuring the quality of the signal and improving signal integrity
Spread copper over large areas to prevent signal interference
It has 2.54 interval hole welded hole for your secondary development
It has the M3 screw hole which is quite commonly used now, and the installation is convenient and reliable
15, have 120 Ω termination resistor, can make short sub R16 can termination resistor
16, with power supply and RXD, TXD signal, receiving and receiving
The Angle pin is introduced to facilitate testing
Support 3.3 V and 5V signal control and compatibility"
Ezt írja. A speckó-táblázat kvázi üres.
-

Zhiend
csendes újonc
válasz
cog777
#38644
üzenetére
Ezt mikor először próbáltam, nem működött, de gondoltam újra ránézek és most perfektűl megy a gépezet
Végül annyit csináltam, hogy teljesen le töröltem mindent az SSD-ről, majd az útmutatót követve megkerestem az idVendort és az idProductot, amit a rendszer adott neki a csatlakozást követően, majd hozzáadtam a cmdline.txt-hez az usb-storage.quirk sort és az egész OP-t át másoltam reboot után SD Copierrel az SSD-re. Mostmár egyből be bootol a rendszer.Mindenkinek nagyon szépen köszönöm a segítséget
-

Keem1
veterán
válasz
cog777
#38620
üzenetére
Sokkal gyorsabb, mint az SD kártya. Memory -> SSD nálam 360-420 MB/s, LAN-on keresztül 80-110 MB/s.
Én nem bántam meg az SSD-t, bár az enyém SATA3-as egy USB3 házikóban (Samsung 860 Evo 1 TB).Ja várj, azt nem tudom, hogy ez igazi SSD-e. Ehhez próba vagy teszt kéne. Keress a neten hozzá write/read teszteket. Ha ilyen 300 MB/s (megaBÁJT per sec) értékeket találsz, akkor igazi SSD.
-

BalanceR
addikt
válasz
cog777
#38535
üzenetére
Nálam Armor is, és Neo is szolgál egy egy PI4esen, a Neos 2GHzre van húzva, ilde 52 terhelve max 68 fok, akkor is, ha performance módban van. Az armoroson csak Libre megy Kodival, ilde 49 terhelve 58, de az nincs húzva...
Van még egy Orange PIm is, az zárt műanyag vacakban van egy heatsinkel, az sem megy 55 fok fölé, bár azon csak vpn szerver fut, meg syncthing..., Szerintem, ha nincs a cucc húzva, bőven elég lehet egy nagyobb borda is.. a PI 4 85 fokon kapcsol ki, 80nál figyelmeztetést küd, és nálam 70 fokon throttol. -
válasz
cog777
#38133
üzenetére
Van neki vmi nyűgje:
Successfully built ff9cb2a52879
Successfully tagged firefox:latest
pi@raspberrypi:~/Downloads/cog777team-examples-d99cb9b1a364/Docker/firefox $ ./start.sh
docker: Error response from daemon: invalid mount config for type "bind": bind source path does not exist: /home/pi/Downloads/cog777team-examples-d99cb9b1a364/Docker/firefox/shared.
See 'docker run --help'.
-
#38071
wassermann
Topikgazda
cog777
#38069
wassermann
Topikgazda
válasz
cog777
#38069
üzenetére
Ha keresgélsz a neten (running Pi from RAM-disk), egy srác már csinált rá megoldást: elkészíted a rendszered, majd a kártyáról csinálsz egy image-t, ebből az ő progija megcsinálja neked az egész cuccot amit visszamásolsz a kártyára.
Még nem próbáltam, de állítólag a boot kicsit hosszabb, mert a RAM-diskbe kicsomagolja a teljes rendszert. Viszont utána gyors, mint a villám -

cigam
titán
válasz
cog777
#38001
üzenetére
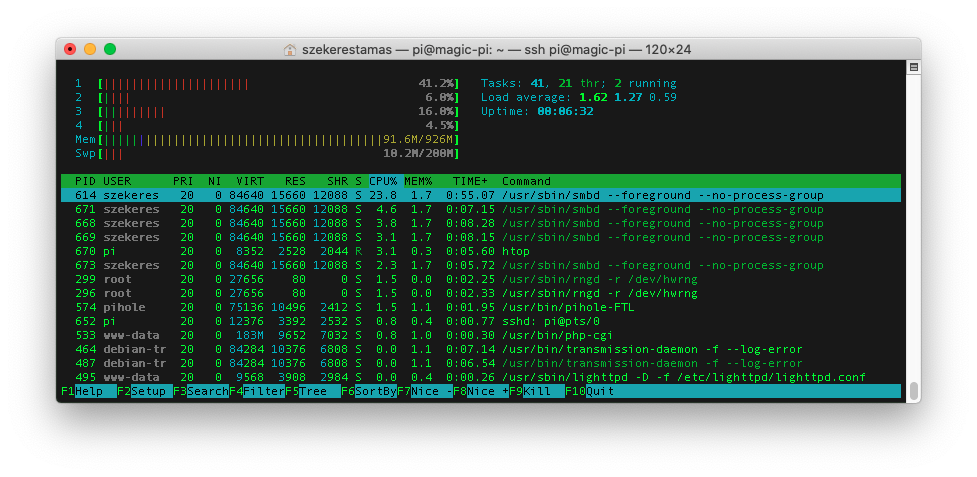
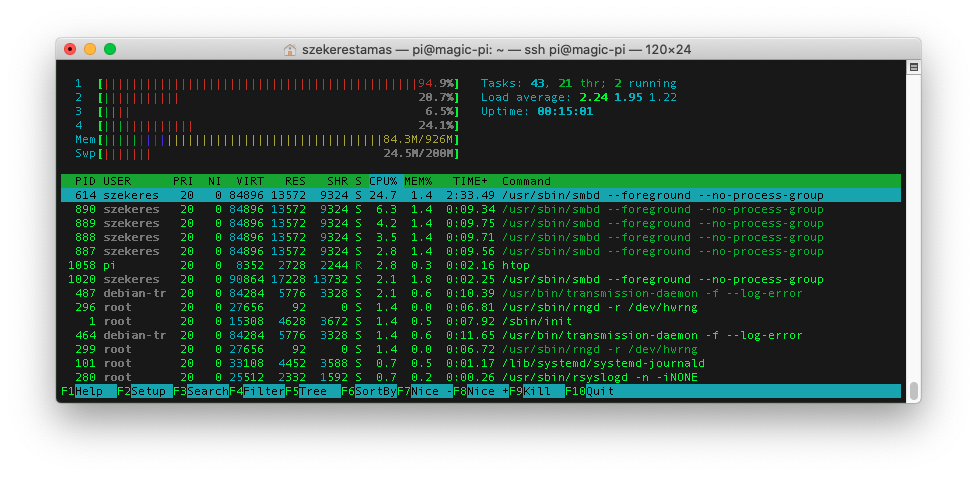
100% CPU használat... Nem vagy te költő, hogy túlzásokba ess.
Mikor ami a csövön kifér, másolok ext4-ről, a Samba a legnagyobb erőforrászabált, de egy is 40% alatt terheli az egyik magot a 4-ből
Próbáltam elcsípni egy olyan pillanatot, amikor 40 fölé megy.
Ha rádugok, egy NTFS merevlemezt is és arról is elkezdek másolni, valóban felmegy 100% közelébe.
A mount.ntfs nincs is a lista élén, 20% alatti terhelést mutat időnként. Szóval mi terheli 100%-ra? Ja, és ez "csak" egy Pi2. Az újabb kiadásokban jóval több kraft van. -
-
Keem1
veterán
válasz
cog777
#37527
üzenetére
Annyira jó lenne, ha megoldanák az USB bootot és a full sd kártya nélküli működést.
SSD nagy fájlok másolása: 450-600 MB/s
SSD kis fájlok másolása: legalább 120 MB/s
Ez azért a rendszernek is jól jönne.Talán a következő Pi verzióban esetleg kapunk a hátoldalon az SD kártya helyett/mellett egy NVMe foglalatot is. Elvileg a 80x20-as SSD-k még a foglalattal együtt is elférnek a Pi hátoldalán (85 mm a hosszabbik oldala). A csatlakozó ugyan nagyobb, mint 5 mm, de a 80 mm hosszban az érintkezősor is benne van, ami a csatlakozóban landol.
-












 .
.




 ?
?


 : "Support 3.3 V and 5V signal control and compatibility"
: "Support 3.3 V and 5V signal control and compatibility" , noigen. Nem dugjuk direkt 230V-ba se a pi-t
, noigen. Nem dugjuk direkt 230V-ba se a pi-t 








Új hozzászólás Aktív témák
 wassermann
wassermann
- AMD Ryzen 5 5600X/3070/512Gb SSD/32Gb RAM/850W GOLD
- Gamer PC - Ryzen 7 5700X / RX 9060 XT 16GB / B550 WIFI / 32GB RAM 3600Mhz / 1TB M.2 SSD / 650W GOLD
- Eladó Komplett gép
- ASUS ROG Strix Z890-E Gaming + Core Ultra 7 265K + G.Skill Trident Z 48GB DDR5 8200MHz CK eladó
- -ÚJ,2 ÉV GAR- GAMER PC: RYZEN 5 4500-5600X +RX 6600/6700XT +16-64GB DDR4! SZÁMLA! 70 féle ház!
- HIBÁTLAN iPhone 14 Pro Max 512GB Silver -1 ÉV GARANCIA - Kártyafüggetlen, 100% Akkumulátor
- LG 65G4 - 65" OLED evo - 4K 144Hz & 0.1ms - MLA Plus - 3000 Nits - NVIDIA G-Sync - FreeSync Premium
- BESZÁMÍTÁS! ASRock B450M R5 3600 16GB DDR4 256GB SSD 2TB HDD RTX 2060 Super 8GB RAMPAGE Shiva 450W
- iPhone 12 Pro 128GB Pacific Blue - 1 ÉV GARANCIA - Kártyafüggetlen, MS3259,100% Akkumulátor
- GYÖNYÖRŰ iPhone 13 Pro 256GB Sierra Blue -1 ÉV GARANCIA - Kártyafüggetlen, MS3361, 100% Akksi
Állásajánlatok

Cég: Laptopműhely Bt.
Város: Budapest

Cég: NetGo.hu Kft.
Város: Gödöllő