- Samsung Galaxy S24 FE - később
- Bemutatkozott a Poco X7 és X7 Pro
- Itthon is kapható lesz a kerámia Xiaomi Band 10
- Csak semmi szimmetria: flegma dizájnnal készül a Nothing Phone (3)
- Fotók, videók mobillal
- Honor 400 - és mégis mozog a kép
- Google Pixel topik
- iPhone 16e - ellenvetésem lenne
- Azonnali navigációs kérdések órája
- Poco X6 Pro - ötös alá
Új hozzászólás Aktív témák
-
#9018
 Steve_Brown
senior tag
Tomika86
#9010
Steve_Brown
senior tag
Tomika86
#9010
Steve_Brown
senior tag
válasz
 Tomika86
#9010
üzenetére
Tomika86
#9010
üzenetére
Attól is függhet, hogy a CPU tud-e olyan kommunikációt a CP kártyán, nem csak a standard TCP-IP üzeneteket képes küldeni/fogadni.
Illetve a CP kártyán is lehet valamilyen beállítás, hogy csak valamilyen aláírt üzeneteket fogad el.
+ a Process Image mérete is számottevő. Ha 512-es Process Imaget tud a CPU akkor jó lehet mert alapértelmezetten a 25X. címre kerül a CP kártya. Ha beviszed a címének kezdését, hogy beleférjen úgy is működhet.
-
#9007
Steve_Brown
senior tag
Tomika86
#9006
-
-

ratkaics
senior tag
válasz
Tomika86
#8721
üzenetére
Szia!
Első körben az jutott eszembe, hogy nem-e esetleg logaritmikusra van állítva a szelephajtás?
Ezt a doksit nézd át.
Ami még okozott még gondot egy esetben nálunk, hogy annak a PLC-nek a bemenete jobban "beterhelte" a szelephajtást, de szerintem ez nálad nem játszik.
De szerintem annyira sajnos nem jó ez a szelephajtás. -

byte-by
tag
válasz
Tomika86
#8576
üzenetére
Szia
nem igazán értem a problémát.
a darabok nem megkülönböztethetőek?
ha egy szenzor figyeli a darabokat akkor elindítasz egy secundumos számlálót ami percenként újraindul, és az addig mért darabokat elmented egy memóriába, majd kezdődik előről. memóriatömböt hozol létre, egy nagyobb területet, és a mentéskor shift-eled.
abból tudsz majd átlagot vonni, van erre utasítás.
de lehet nem értem mi a probléma. -

Gaben92
őstag
válasz
Tomika86
#8562
üzenetére
Én használtam i5-el még V14-et (első 64 bites release) és nem volt vele gond, azóta meg csak optimalizáltabb lett. RAM viszont az kell neki bőven. Elfut éppen 8GB-on de azt könnyen ki lehet akasztani. A mostani i7-10750 + 32GB DDR4 kombóval még nem sikerült out of resources problémába futni annyit tudok.
-

DasBoot
aktív tag
válasz
Tomika86
#8476
üzenetére
Elnézést, hogy egyelőre nem tudok pontos hibaüzenetet íni, de állóképet nem tudok küldeni, de igyekszem, mivel nem vagyok PC-PLC közelben. Amint tehetem, bemásolom.
Pontosan ezt csinálom, ami a rövidfilmen van, azzal a különbséggel, hogy a Version 3.0, bár a 2.0 és 4.0 sem működött. Igen, érzékeli online a Program blocks-ot, és az Upload-nál írja a hibát. -
DasBoot
aktív tag
válasz
Tomika86
#8473
üzenetére
Jó szerencsét! Próbálkoztam v12, v13, v13SP1-gyel. Az elsővel nem is kapcsolódott, ezzel, viszont igen: compatibility_mode_V13_V13SP1, ezt a Siemens honlapról töltöttem le:
https://support.industry.siemens.com/cs/document/82169157/in-step-7-(tia-portal)-v13-sp1-how-do-you-load-project-data-from-a-device-that-has-been-configured-with-step-7-(tia-portal)-v12-sp1-or-v13-?dti=0&dl=en&lc=nl-NL
-

Szirty
őstag
válasz
Tomika86
#8412
üzenetére
Szia!
Ha szimbolikus címzésmódot használsz akkor átcímzi.
A project fa Blocks elemén jobb katt, menüből Object Properties... kiválaszt.
A megjelenő ablakban válts az Address priority: fülre és kapcsold be a szimbolikus programozás módot:
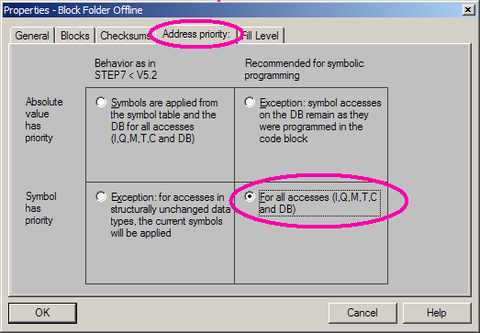
Ezután ha címet módosítasz (ha a jobb alsót kapcsoltad be akkor bármilyet) akkor átírja a hivatkozást a program blokkban de sajnos csak akkor ha megnyitod és kimented azt a blokkot. Ilyenkor szól is:
Szerintem próbáld ki egy üres próba projecten és PLCSIM-ben esetleg mielőtt ezzel kapcsolatban újabb kérdést teszel fel, mert én spec. nem használom a szimbolikus módot

-
-
Szirty
őstag
válasz
Tomika86
#8292
üzenetére
Nem tudlak követni. Először a háttérszínnel volt a baj. Nem említettél nyugtázó gombbal kapcsolatos problémát és ilyen gombot a kérdéshez mellékelt képeiden sem látok.
"nem tudtam a Line típussal megoldani, hogy a sor végén lévő nyugtázó gomb feljebb legyen "
A Line stílusú alarm view-ben nem lehet ack button.
Használj külön gombot a nyugtázáshoz aminek beállítod a "Keyboard operation of screen objects / Alarm view acknowledge alarm" funkciót.
Azt már oda teszed ahova akarod (ahol nincs takarásban). -
Szirty
őstag
válasz
Tomika86
#8283
üzenetére
Kicsit körülményesen, de megoldható.
A csúnyább megoldás az, ha ráteszel egy gomb méretű és háttér színű téglalapot aminek a láthatóságát a másik bittel vezérled. A téglalappal így eltakarod a gombot.
A gond ezzel az lehet, hogy ha billentyűzetet csatlakoztatnak a panelhez és az eltakart gombra helyezik a fókuszt, akkor aktiválni lehet Enterrel.
Ez ellen lehet védekezni azzal, hogy a téglalapot megjelenítő bit egyben letiltja a gombot (Animation/Enable object)Esetleg az is megoldás lehet neked hogy nem tünteted el a gommbot, csak letiltod (hatástalan lesz) ezzel az Animation/Enable object lehetőséggel. Esetleg Apperance megfelelő használatával ki is szürkítheted hogy látszódjon hogy tiltva van.
A másik lehetőség hogy írsz rá egy scriptet.
Létrehozol egy boolean belső változót (internal tag), a gomb láthatóságát beállítod erre.
A scriptet function-ra állítod, adsz neki két paramétert, a scriptben megírod a logikai összefüggést az eredményt a belső változóba teszed.
A két Tag-nek amivel a gombot akarod eltüntetni pedig a change value eventjéhez hozzárendeled a scriptet.
Ne felejtsd el ennek a két tag-nek az adatgyűjtését folytonosra állítani (Acquistion mode = Cyclic continuous)! -
Szirty
őstag
válasz
Tomika86
#8281
üzenetére
Szia!
"DB értéke ha 0 akkor nem történik semmi, ha NEM 0 akkor meghívódik az FC, de csak akkor ha M13.0 FALSE"
Igen. Ez van a kódban.
A CALL FC62 csak akkor fut, ha DB15.DBW15 nem nulla ÉS M13.0=FALSE.
Minden más esetben ugrik és elkerüli a az FC62 hívását.
Nem tudom mi a szerepe az M13.0 bitnek és a DB15.DBW15 értékének, én csak azt látom amit ide beírtál.
Mellesleg a DB15.DBW15 tartalmát nullázza ha az nem nulla.
O helyett A is lehetne. Mivel az /FC status bit értéke itt 1, nem hajt végre sem ÉS sem VAGY műveletet. -
Szirty
őstag
válasz
Tomika86
#8278
üzenetére
Szia!
Az összehasonlítás szerint ugrik M001-re ha DB15.DBW15 tartalma nulla. Ha nem nulla akkor nem ugrik, megy tovább.
"M13. 0 miért O, miértnem A? "
Miért nem A? Ezt a kérdést nem értem.
"Elötte hol íródik az RLO?"
Itt: O M13.0
Mivel az O előtti utasítás, ami a status word /FC (first contact) bitjét 1-be rakja az a ==I összehasonlítás, az O M13.0 nem hajt végre OR műveletet semmivel, egyszerűen az RLO-ba helyezi az M13.0 értékét. -

spkkill
tag
válasz
Tomika86
#8262
üzenetére
Természetesen kívül kell megadnod. Meghívhatod az FB-n belül is közvetlenül az időzítőt a száma alapján. Ha csak 1-szer használod az FB-t semmi gond ezzel. Viszont ha többször használod fel akkor a következőeghívott FB-ben felülíródik.
Láttam már ilyen baki miatt gyártósort megállni.
-

ZetorGumi
addikt
válasz
Tomika86
#8245
üzenetére
Puding próbája az evés.
Elvileg annak kéne lenni. Addig próbálkozik a konfiguráció megkeresésével, aztán elindul hibával.
Ez azért van benne, hogy ha bonyolultabb profinetes hálózat van, sok külső eszközzel, akkor legyen ideje mindennek elindulni a vezérlés indulása előtt. -
spkkill
tag
válasz
Tomika86
#8236
üzenetére
Szia!
FB-n kívülröl is meg tudod címezni az FB adaterületeit (IN,STATIC,OUT.....). Ha az FB után írod a reseteket akkor felül tudod írni a nem aktív FB váltózóit. Működik, de nem túl elegáns megoldás. Inkább az FB-nek rakj egy engedélyező bemenetet és ha nem aktív reseteld a kimeneteket és lépj ki a blokkból az adott nyelvhez passzoló utasítással (BEC,RETURN.....). -

moseras
tag
válasz
Tomika86
#8231
üzenetére
Üdv!
> egy FB-t feltételesen meghívok
Szerintem amikor meghívod, akkor végrehajtódik a "benne lévő" program, amikor viszont nem hívod meg, akkor nem hajtódik végre a "benne lévő" program, és a benne lévő változók (legyenek azok kimeneti, vagy belső változók) megtartják értéküket.
Tehát ha egy változó egy korábbi meghívás után adott értékre állt be (mert a program úgy állította be), akkor az így marad mindaddig, amíg újból meg nem hívódik, és a program nem állítja más értékre.
> kimenetek 0-ák legyenek?
Akkor ne feltételesen hívd meg, és programozd le, hogy mikor legyen 1 vagy 0. Ettől még használhatod a SET, RESET-et, kapuzd ki, hogy mi a SET és mi a RESET feltétel (lehet, hogy egyik feltétel sem fog teljesülni, ekkor a kimenet marad a korábbi állapotában).
-

n0rbert0
senior tag
válasz
Tomika86
#8227
üzenetére
Szia,
A "DeviceStates" funkcióval kitudod olvasni, hogy az adott hálózaton az eszközök milyen állapotban vannak csak az OUT bemenetére a megfelelő módot kell kiválasztani:

Így a STATE inout-ra megkapod a kívánt státuszt az összes eszközre (példában a MODE 2 van):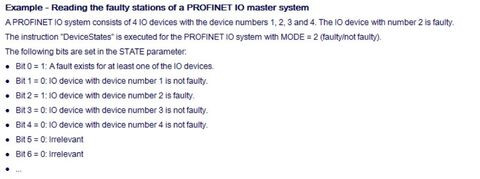
Az eszközök kikapcsolására meg a "D_ACT_DP" funkciót kell használod. Itt szintén a MODE bemeneten meg kell adnod mit szeretnél csinálni az adott eszközzel:

És amikor a REQ bemenetre felfutó el jön, akkor végrehajtja a MODE-ban kiválasztott job-ot.
Annyi korlátozás van, hogy 1200-as PLC esetében csak profinet eszközökre használhatod ezt az utasítást, de a Te arra is akarod használni. -
spkkill
tag
válasz
Tomika86
#8199
üzenetére
Szerintem a recept elemeknek nincs "visibility" tulajdonsága. A Recipe view viszont rendelkezik ezzel a tulajdonsággal. Több lehetőség is eszembe jutott. 1. Két receptet hozol létre és két külön Recipe view -ban kezeled őket. Így a biteddel tudsz váltani a két Recipe view között. 2. Benne hagyon az elemet a recepteb és PLC-ben tiltod a betöltését a bit állapotától függően. 3. Készítesz egy saját recept kezelés a HMI-re ,input field-ekkel azokat már el tudod rejteni.
-
spkkill
tag
válasz
Tomika86
#8186
üzenetére
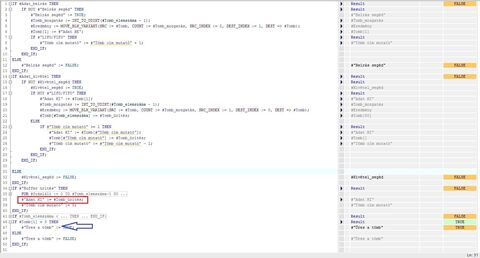
Ha mégis belülről szeretnéd megoldani (elegánsabb). A piros részben a "#Tömb_ürités" helyére írsz egy nullát vagy a kék nyíllal jelölt helyre beírod ,hogy ' #"Adat KI" := 0; '. Szerintem az első is működni fog ,valószínűleg ott marad valamilyen érték amit a "#Tömb_ürités" tárol.
-
spkkill
tag
-
Szirty
őstag
válasz
Tomika86
#8138
üzenetére
Fontos, hogy az idő BCD formátumban kell hogy legyen!!
No meg van egy gyakoriság (acquistion cycle) ami alapból 1 perc, tehát csak percenként szinkronizál, nem azonnal.
Ha van a projectetben olyan alarm view ami system message-re van állítva, akkor azt nézd meg. Igen hasznos dolog amúgy egy ilyen ablak, nekem sokszor segített már. Ide írja az OP ha valami kínja van, -
n0rbert0
senior tag
válasz
Tomika86
#8093
üzenetére
Szia,
Akkor ezek szerint átmegy a nyomaték limit is?
Az első kép tanulsága szerint igen, mert a beállított nyomaték limit 2 és az aktuális is 2. Az már jó kérdés, hogy miért nem mutatja a V-ASSISTANT.
Egyébként csodálkozom, hogy ilyen kis limittel egyáltalán megmozdul a motor."Arról van leírás hogy ez pontosan mit csinál?"
Mire gondolsz a nyomaték limitekre? Gondolom a V90 operating manuáljában van valami írás róla. De a lényeg, hogy a beállított értékek alá/fölé nem engedi a motor forgatónyomatékát, úgy állítja a sebességet, áramot, stb...Fontos, amit korábban is említettem, hogy a nyomaték limitek amit telegramban küldesz azt skálázni kell! A skálázás meg úgy történik, hogy 0=0NM, -4000H=P2003-ban megadott érték * -1, 4000H=P2003.
A mechanika figyelembevételével állítsd a nyomaték limiteket, mert nyilván ha már pl. van egy áttétel a rendszerben, akkor azzal is számolni kell. A kiszámolt értéket beírod az M_LIMIT_POS-be, a -1 szeresét meg a M_LIMIT_NEG-be és akkor a motorod közel akkora erőt fog kifejteni a kupakra bármerre is forogjon. Ha az egyik irányba nem akarod limitálni, akkor oda írj 4000H-t vagy -4000H-t attól függően melyik irányról beszélünk.Elvileg ugye TO-t akarsz használni pozicionáló tengellyel. Ez esetben én valahogy úgy csinálnám, hogy beállítanám a nyomaték limiteket, majd elküldeném a tengelyt egy olyan pozícióba amit soha nem érhet el. Közben figyelném az aktuális nyomatékot és ha eléri a kívánt értéket, akkor megszakítanám a mozgást és kész a folyamat. (Esetleg ezután még a tengelyt visszaállítanám 0-ra ha van rá idő.) Ekkor azért a követési hiba figyelést tanácsos kikapcsolni...
-
n0rbert0
senior tag
válasz
Tomika86
#8088
üzenetére
Szia,
A global lib-ek közé adja hozzá.
Nekem az volt furcsa, hogy a 750-es telegram első szava (M_ADD1) átmegy a hajtásba a többi meg nem.
Neked a SINA_POS függvény kell, ha traversing blokkot akarsz használni. Ez úgy működik, hogy a hajtásban V-ASSISTANT segítségével előre definiálod a pályát és azt tudod "végrehajtatni".
A SINA_PARA, mint ahogy a neve is mutatja arra való hogy a hajtásból/hajtásba paramétereket olvassunk/írjunk. -
n0rbert0
senior tag
válasz
Tomika86
#8084
üzenetére
Akkor még a basic positioner traversing blokokkal lehet játszani. Az szerintem egy kicsit bonyolultabb, de elvileg ott van egy olyan funkció, hogy "FIXED_STOP". Ezt a "FIXED_STOP"-ot még nem használtam, arról nem tudok nyilatkozni, de egy ilyet találtam róla: [link]
A basic positioner-hez itt találsz lib-et, leírással együtt: [link]Nyilván ebben az esetben más telegramot kell használni és a TO kimarad a mókából.
-
n0rbert0
senior tag
válasz
Tomika86
#8081
üzenetére
Igen az elég érdekes, hogy a telegram első word-je átmegy a 2. és a 3. meg nem.
Biztosan jó címet írsz? Nem írja más? Azért kérdezem, mert kezdek kifogyni az ötletekből
Igen, nyilván ha a limitek 0-ák, akkor nem fog elindulni. Kezdésnek -4000H és 4000H írnék bele.
"A Traverse to fixed endstop-ot írták a másik telegramban az aktiválónak. Ez itt nem kell?"
Megpróbálhatod írni, de szerintem nem fog menni. Elvileg az a standard telegram 4. word-jének a 8.bitje (ami a fordított bájt sorrend miatt a PLC-ben az első bit lesz). -
n0rbert0
senior tag
válasz
Tomika86
#8079
üzenetére
Szia,
V-ASSISTANT-ban a Select drive fülön a control mode az speed control?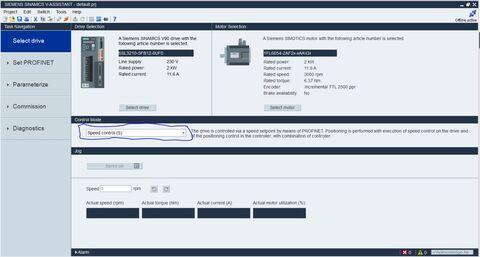
A Set Profinet fül valahogy így néz ki?
A TIA-ban a hajtás konfigja valami hasonló?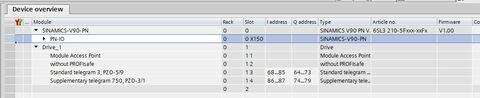
Megnéztem 0-4000H közé skálázza a nyomatékot, a referencia nyomatékot a P2003-as paraméterben találod (azt rendeli a 4000H-hoz).
V-ASSISTANT-ból eltudod indítani a motort?
-
n0rbert0
senior tag
válasz
Tomika86
#8074
üzenetére
Szia,
Nem az M_ADD1-nek kell adni értéket. Leírást nem találtam róla, de szerintem az azt csinálja, hogy amit a hajtás kiszámol nyomaték setpoint-ot ahhoz ezt az értéket hozzá adja. Magyarul ha nem csinálsz a motorral semmit, éppen áll, de be van kapcsolva, akkor a nyomatékot próbálja 0-án tartani, de ha te beleírsz ebbe az M_ADD1 értékbe, akkor az hozzáadódik a (hajtás által) kiszámolt nyomaték setpoint-hoz, ergo az nem 0 lesz. Így a motor forogni fog.
Mint említettem neked a 2. és 3. kimeneti word fog kelleni a 750-es telegramból. Az M_LIMIT_POS és M_LIMIT_NEG.
A 102-es telegramban meg valószínűleg azért nem tudsz semmit sem állítani, mert a TO "ráül" és írogatja a háttérben. Mivel gondolom észrevetted, hogy a Supplementary Telegram-ot nem tudod megadni a TO "wizzard"-ban, ezért ezt a TO nem írja, ez a felhasználói programra van bízva.
Azon nem kell csodálkozni, hogy 1200-ben nem működik minden, mert ez a TO-s dolog 1500-re lett fejlesztve és 1200-re csak rá van "erőszakolva".Próbáld meg azt amit fentebb írtam.
Így sebesség szabályzó üzemmódba lesz a motorod nyomaték korláttal.TIA V16-hoz természetesen nem jó a 15-ös licence.
-
n0rbert0
senior tag
válasz
Tomika86
#8070
üzenetére
Szia,
Szerintem megoldható kétféleképpen.
Az egyikhez TIA V16 kell. Ez gondolom nálad nem opció, mert úgy rémlik V15 vagy 15.1-et használsz.
Ebben az esetben V-ASSISTANT programmal kell beállítani a hajtásban a paramétereket.
TIA-ban a hajtást konfigjába behúzod pl. standard telegram 3-at + supplementary telegram 750-et. Ezután a TO-t beállítod értelem szerűen, majd a V-ASSISTANT-ban a PROFINET fűlnél megadod, hogy milyen telegramokat állítottál be a TIA-ban. Ha más paramétert nem akarsz állítani, ne felejtsd el elmenteni a ROM-ba a beállításokat (Tools->Save parameters to ROM).
Ha ezekkel megvagy, akkor amit TIA-ban a supplementary telegram-ban megadtál IO-tartományt a kimeneteknél a 2 .word lesz pozitív irányban a forgatónyomaték limit a 3. word pedig negatív irányban. Az input wordon az aktuális forgatónyomaték értéket látod. (Azt hiszem ezek skálázott értékek -nominális forgató nyomaték és +nominális fogatónyomaték -> -4000H és +4000H, de erre most nem esküdnék meg.)
Ezután a mechanikai paraméterek ismeretében könnyen ki lehet számolni, hogy adott erő kifejtéséhez mekkora forgatónyomaték szükséges.
Ha nem adsz meg limitet akkor 0 érték van benne, tehát nem fog forogni a motorod.
Arra is ügyelj, hogy ha nyomaték korlátba ütközik a motor, akkor nagy valószínűséggel a pozíciószabályzó az nem fogja tudni tartani a megadott pályát/pozíciót, így ha eléri a megadott toleranciát, akkor hibával meg fog állni. Ezt le kell kezeled programból.(TIA V16-tól már nem kell a V-ASSISTANT ott annyival másabb beállítani.)
-
spkkill
tag
válasz
Tomika86
#8070
üzenetére
Sajnos Siemens hajtásban még nem láttam hasonló megoldást. Pilz hajtással már igen ,egy préselési feladatot lát el a berendezés. Ott pozícionálja a szerszámot és egy bizonyos ponton átvált nyomaték szabályzásra. A motor áramot figyeli (PLC komparátor) ,ha túllép egy bizonyos értéket X másodpercig megáll és visszavált pozícionálás üzemmódra majd felveszi az alaphelyzetet.
-
n0rbert0
senior tag
válasz
Tomika86
#8047
üzenetére
Szia.
Bal oldalt a fában az axis-nál vagy a hajtásnál a diagostics menüre kattintva nem ír részletesebb dolgot? Esetleg lent a Properties és az Info fülek mellet lévő Diagnostics-ra rákattintva?
Első blikkre talán valamilyen szoftveres limit van beállítva a target range-re vagy valamiért a pozíciót nem tudja lekövetni, bár a beállított sebesség és gyorsulás nem túl nagy. -

asdeerhun
újonc
válasz
Tomika86
#8049
üzenetére
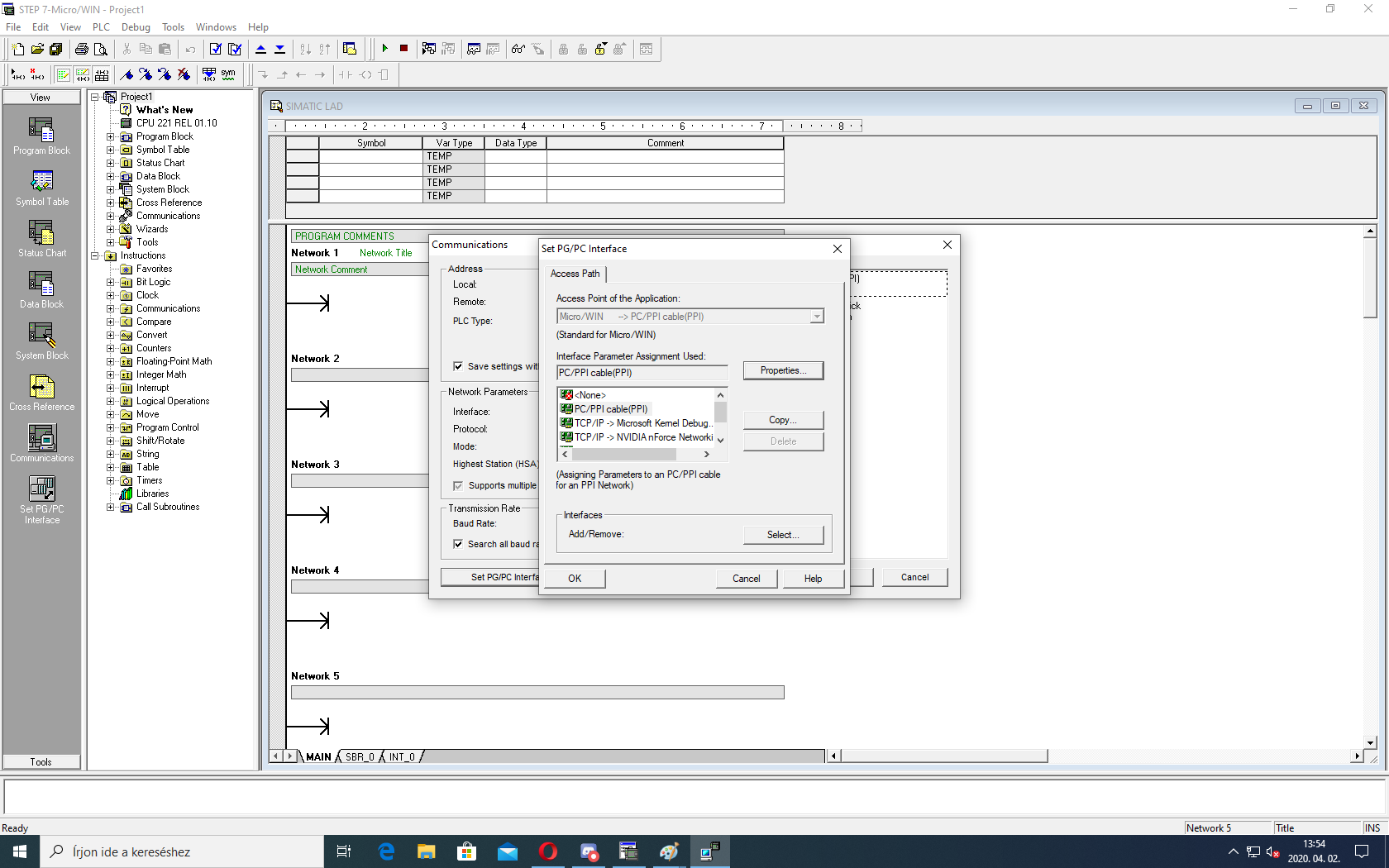
El sem hiszem, de megvan.
Egy ezer éves SP2(!)-es változatot adtak meg amit a Win10 hírből sem ismer.
Meg kellett keresnem az SP9-es változatot, leszedni az összes régebbit aztán be kellett kapcsolnom az MSMQ szolgáltatásokat és már látja is. 3 órát szenvedtem vele de csak meglett.
-
asdeerhun
újonc
válasz
Tomika86
#8035
üzenetére
Update.
Megnéztem, nekem nincs USB lehetőség. COM1 és COM3 között tudok választani, egyikkel sem látja a PLC-t. Megnéztem 100%, hogy a COM1 porton van a dolog. (A COM3 az EasyVeep portja de már azzal is megpróbáltam hátha...) Viszont azóta olvastam olyat, hogy ha Win10-en, USB kábellel szeretnénk S7-200-at programozni akkor 99%, hogy nem fogja látni mert valami nem kompatibilis. Ebben mennyi igazság lehet? -
spkkill
tag
válasz
Tomika86
#8037
üzenetére
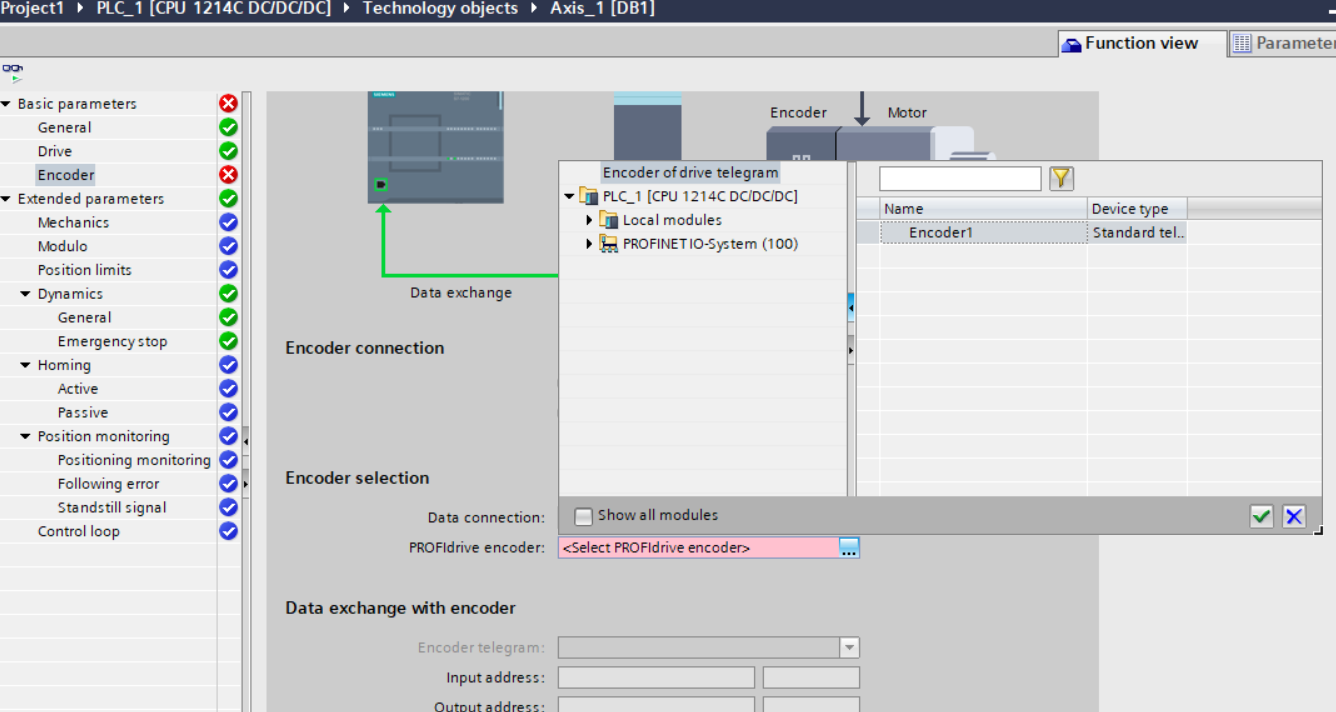
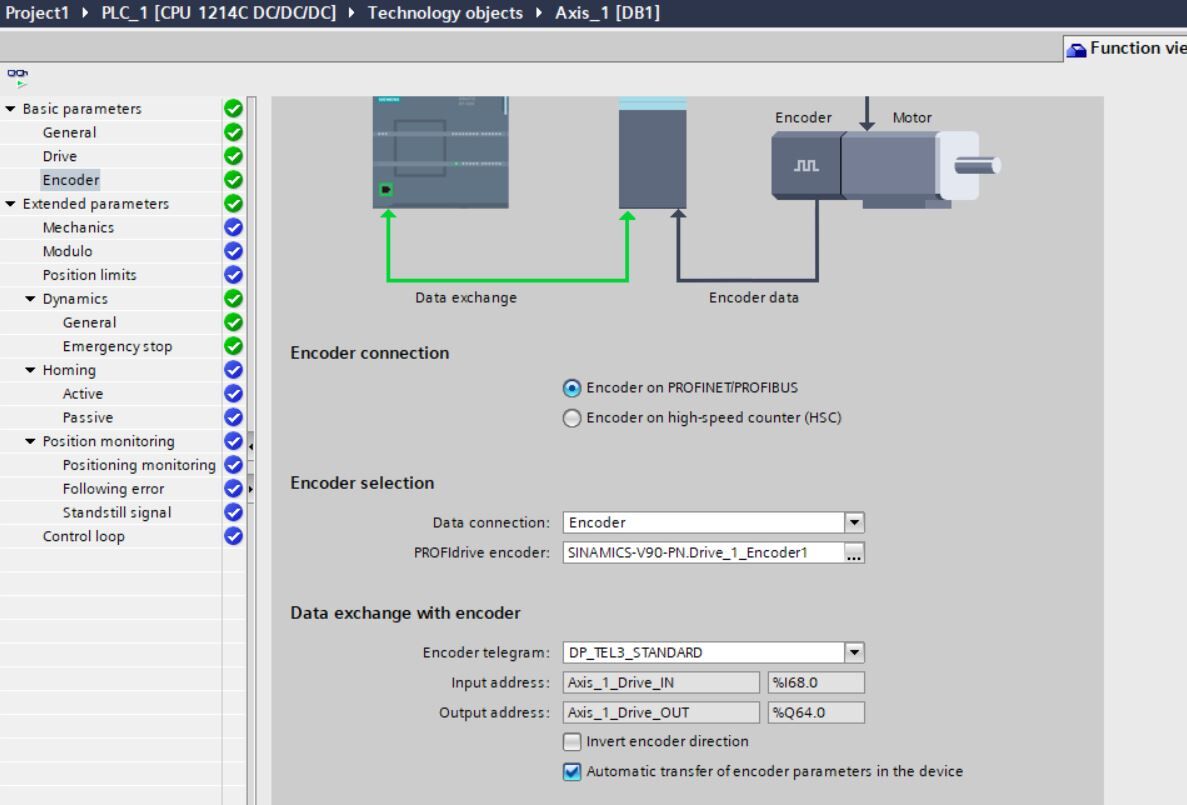
Szia!
Milyen hajtásról van szó? (ha jól látom S120).
Milyen hardvered van? DriveCliQ vagy Profinet-es encoder van a motorban?
A konfiguráció alapján Te Profinet-es encodert választottál amit a Device configba is be kell rakni és kiválasztani az encoder selection-nál. A jobb oldali példán DriveCliq encoder van konfigurálva. -
-

crucified
tag
válasz
Tomika86
#8013
üzenetére
Szia, köszönöm. TIA Portal-ban nem csináltam még ilyet, hogyan lehet a legmegbízhatóbban ezt? V13 SP1 van a gépemen, fogalmam sincs milyen van a CPU-n. Működő gép, nem szeretném "hazavágni", mivel nem tudok feltölteni ezért mentés sincs a projectről, aki készítette már nem üzemel.
Köszönöm
-
n0rbert0
senior tag
válasz
Tomika86
#7996
üzenetére
Ha TIA V14+ és, ha az 1200-as PLC frimware-e 4.1+, akkor ajánlom figyelmedbe a korábban említett motion control technology object-et. link
Ha egy positioning axis-t beállítasz, ott és akkor tudod megállítani a motort ahol szeretnéd (lehet relatív és abszolút mozgás is). Mivel nem abszolút enckódered van ezért ildomos egy homolási szekvenciát is felvenni.
(Habár fentebb azt írtad, hogy nem pozíció szabályzás, most meg még is az, közben kiderül, hogy van frekvencia váltó is. Ha nem szivárogtatnád az információkat, akkor hatékonyabban lehetne segíteni.)
Ha nem szivárogtatnád az információkat, akkor hatékonyabban lehetne segíteni.) -
ZetorGumi
addikt
-
n0rbert0
senior tag
válasz
Tomika86
#7988
üzenetére
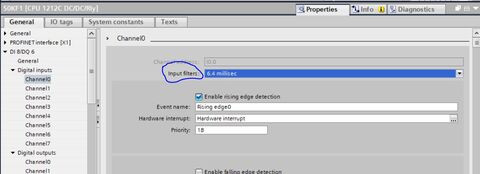
Erre gondoltam, amennyiben HW interruptot használsz.(#7989) Tomika86
Leegyszerűsítve ott tudod beállítani, hogy a PLC mikor kérdezze le az inputok és mikor frissítse az outputok állapotát.
Alapértelmezetten a process image-be frissítve vannak ciklikusan. De akár egy OB-hez is tudod kötni, hogy az adott OB elkezdődik, akkor frissíti a kiválasztott image partícióban a bemenetek állapotát, majd ha az OB lefutott, akkor a kimenetekkel teszi ugyan ezt. -
n0rbert0
senior tag
válasz
Tomika86
#7986
üzenetére
Akkor én még futnék a helyedben egy kört a megszakítási rutinokkal. Szerintem nagyobb pontosság érhető el, mint a ciklikus programban komparalással. Bár nyilván vannak a dolognak korlátai.
Ha nem csal az emlékezetem, akkor az input delay (vagy filtering nem tudom mi a pontos neve) gyárilag 6-8ms körül van. Talán ezt is érdemes kisebbre levenni. -
Szirty
őstag
válasz
Tomika86
#7978
üzenetére
Szia!
Igen!
Így kell csinálni. Fogadd meg ZetorGumi tanácsát.
Illetve lehet még úgy is vizsgálni (ha nem HW megszakítással csinálod, hanem szoftveresen) hogy azt figyeled hogy nagyobb vagy egyenlő (illetve kisebb vagy egyenlő csökkenő irány esetén).
Persze ha az encoder felbontása kicsi a forgás meg lassú, akkor lehet egyenlőségre vizsgálni de nagy felbontás és vagy gyors mozgás esetén ez szívás.
Szervóhajtások is tartományt vizsgálnak (ami állítható, de sosem egyenlőséget néznek).A HW-es megszakításos figyeléssel meg az a helyzet hogy kapsz egy jelet amikor a hajtás ott volt.
De hogy most is ott van arra nincs garancia -















































 Ha nem szivárogtatnád az információkat, akkor hatékonyabban lehetne segíteni.)
Ha nem szivárogtatnád az információkat, akkor hatékonyabban lehetne segíteni.)
Új hozzászólás Aktív témák
Hirdetés

- GAMER PC : RYZEN 5 4500 / 16GB DDR4 / ASUS RX 480 8GB / WiFi / Bluetooth / 512GB M.2 SSD / 500GB HDD
- Dell Latitude 7390, 13,3" FHD IPS , I5-7300U CPU, 16GB DDR4, 512GB SSD, WIN 11, ( olvasd végig )
- Acer PREDATOR HELIOS NEO 16 / i9-14900HX / RTX 4070 (140W) / 1 TB SSD / 240HZ
- Topping A70 Pro fejhallgató erősítő
- Topping D70 Pro Octo DAC
- Lenovo Legion Pro 5 16IRX9
- Update 06.27. Bomba árak 2025-ben is! Üzleti - Consumer laptopok DELL FUJITSU HP LENOVO
- Bomba ár! HP ProBook 430 G8 - i5-1135G7 I 16GB I 256GB SSD I HDMI I 13,3" FHD I Cam I W11 I Gari!
- Telefon felvásárlás!! Apple Watch SE/Apple Watch SE 2 (2022)
- HATALMAS AKCIÓK / MICROSOFT WINDOWS 10,11 / OFFICE 16,19,21,24 / VÍRUS,VPN VÉDELEM / SZÁMLA / 0-24
Állásajánlatok

Cég: CAMERA-PRO Hungary Kft
Város: Budapest
Cég: Promenade Publishing House Kft.
Város: Budapest