Hirdetés
- Milyen okostelefont vegyek?
- Amazfit Helio Strap – képernyőmentesen
- iPhone topik
- Rossz hírek a Galaxy S26-ok teléjét illetően
- Miért fárad gyorsabban az iPhone akku, mint az androidos?
- Netfone
- Vivo X200 Pro - a kétszázát!
- Samsung Galaxy Z Flip5 - ami kint, az van bent
- Apple iPhone 16 Pro - rutinvizsga
- „Új mérce az Android világában” – Kezünkben a Vivo X300 és X300 Pro
-

Mobilarena
Arduino hardverrel és szoftverrel foglakozó téma. Minden mikrovezérlő ami arduinoval programozható, és minden arduino program, board, és hardverrel kapcsolatos kérdések helye.

Új hozzászólás Aktív témák
-
#13575
 tonermagus
aktív tag
Janos250
#13572
tonermagus
aktív tag
Janos250
#13572
tonermagus
aktív tag
válasz
 Janos250
#13572
üzenetére
Janos250
#13572
üzenetére
Janos250: Sajnos mind a két koordinációra pontosan kell hogy beessen

Tankblock: Nem tudom miről beszélsz, azt se tudom ki- vagy mi az a Nordic, STM32-ről már ne is beszéljünk Jó, ki tudnám googlizni És pont ezt szeretem ebben a "hobbiban" (mert nekem ez csak az) hogy én csak hobbi "programozó" vagyok, sokszor az alapokkal sem vagyok tisztában, az elektronikával is csak fél éve ismerkedem de mégis mindent megvalósítottam eddig, még ha nem is elegáns módon Fél éve még azt se tudtam mi az az áramerősség, mi az a Serial port, azt meg pláne hogy lehet oda adatot kiíratni/beolvasni
Jó, ki tudnám googlizni És pont ezt szeretem ebben a "hobbiban" (mert nekem ez csak az) hogy én csak hobbi "programozó" vagyok, sokszor az alapokkal sem vagyok tisztában, az elektronikával is csak fél éve ismerkedem de mégis mindent megvalósítottam eddig, még ha nem is elegáns módon Fél éve még azt se tudtam mi az az áramerősség, mi az a Serial port, azt meg pláne hogy lehet oda adatot kiíratni/beolvasni -
#13571
tonermagus
aktív tag
Janos250
#13568
tonermagus
aktív tag
válasz
Janos250
#13568
üzenetére
Ha már így szóba jött az ESP32: az én GPS projektemhez most jobban járnék ha ESP32-t használnék Mega helyett? Ugyebár A vevő oldalon RF-en adatot olvasok be, tárolok le, majd GPS adatot nyerek ki, számolom a kettő közötti távolságot, majd kiíratom a távolságot. Ebben az esetben lehet szűk keresztmetszet a Mega?
-
#13559
tonermagus
aktív tag
Tankblock
#13558
tonermagus
aktív tag
válasz
 Tankblock
#13558
üzenetére
Tankblock
#13558
üzenetére
Juj, tényleg...
Array[1]-el nem az Array[0] és az Array[1]-es elemet hozom létre, hanem csak Array[0]-át
Köszi szépen!
Viszont sokszor még most is felcserélve küldi a koordinátákat. Bár ez megoldható úgy, hogy megnézem melyik a nagyobb szám az lesz a latitude Legalábbis Magyarországon és a környező országokban -
#13557
tonermagus
aktív tag
tonermagus
aktív tag
Be kell hogy valljam hogy elcsesztem
A DistanceKM függvénynek teljesen mindegy, hogy int vagy float-ban kapja az adatot mert aLocation_tclass lekezeli/skálázza. A gond ott volt, hogy én a függvényt csak a program elején hívtam meg, amikor még nem volt adata a két paraméternek. Betettem a loopba és szuperül működik Végre kezeli a Base vevőtöl kapott GPS koordinátákat, és ahhoz képest számolja a távolságot.
Már csak egy hiba van: néha felcseréli a két kapott értéket...
Ez nyilván azért van, mert én így küldöm a két adatot:radio.write(&gpsadat, sizeof(gpsadat));radio.write(&gpsadat1, sizeof(gpsadat1));
Megpróbáltam azt, hogy a küldő Arduinon deklatárltam egy arrayt:float gpsadat[1];
Ezeknek értéket adtam és már ment is aradio.write(&gpsadat, sizeof(gpsadat));
A vevő oldalon pedig szintén deklaráltamfloat gpsadat[1];-ot és lefut aradio.write(&gpsadat, sizeof(gpsadat));viszont csak agpsadat[0]jön át. Mi lehet a gond? -
#13554
tonermagus
aktív tag
tonermagus
aktív tag
Gyanítom hogy nem, mert így sem jó
-
#13553
tonermagus
aktív tag
Tankblock
#13552
tonermagus
aktív tag
válasz
Tankblock
#13552
üzenetére
Nagyon szépen köszönöm!
A sör tényleg kijár Ha adsz egy címet akkor a belgasörmestertől küldök is
Ha adsz egy címet akkor a belgasörmestertől küldök is
Már csak azért is, mert nem vágom pontosan hogy gondoltad. Nem vagyok profi programozó
De így csináltam:
Deklarációs részbe még a setup elé betettem ezt:NeoGPS::Location_t base (gpsadat,gpsadat1);// amit Nrf-en kapunkNeoGPS::Location_t rover (lan,lon);// amit helyileg nyer ki a NEO 8M
A loopba pedig:float range = rover.DistanceKm(base);
Így gondoltad? -
#13544
tonermagus
aktív tag
tonermagus
aktív tag
Ma egész szépen elhaladtam a GPS projektemmel. Felépítettem a Bázis állomást, NEO GPS 8 leszedi a GPS koordinátát, azt eltárolom egy floatban amit átküldök NRF24L01+PA+LNA-val a Rover eszköznek.
float gpsadat=fix_data.latitude();float gpsadat1=fix_data.longitude();radio.write(&gpsadat, sizeof(gpsadat));radio.write(&gpsadat1, sizeof(gpsadat1));Tudom, ez nem túl elegáns, tömbként jobb lenne átküldeni, de még nem jöttem rá hogy kell lekódolni
Na mindegy, a lényeg az, hogy ez meg is érkezik a Rover-hez, mindkét érték tökéletesen megjelenik Seriallal kiíratva a gpsadat és gpsadat1-et.A gond ott kezdődik, hogy ugyebár két dinamikusan változó GPS koordináta között akarok távolságot mérni. Így az alábbi parancsot használom:
NeoGPS::Location_t base( gpsadat, gpsadat1 );float range = fix.location.DistanceKm(base);Ez tökéletesen működik ha fix számot írok be a :
NeoGPS::Location_t base( 43.121212, 20.121212 );float range = fix.location.DistanceKm(base);De ha oda a gpsadat, gpsadat1 -t használom akkor nagyon hülye adatok jönnek ki.
Hosszas nyomozás után rájöttem, hogy a Location_t elvileg int32_t változót vár paraméternek, én pedig ugye float-ot adok. Így a gyakorlatban ezt kapja:NeoGPS::Location_t base( 43, 20 );Hogy tudom azt megcsinálni, hogy a 43.121212-ból 43121212 legyen? Mert úgy is elfogadja. Tudom hogy nagyon alap dolog, de rajtam kifog
Próbálkoztam az
int32_t gpslat=gpsadatsorral is, de ekkor is csak 43 tárolódik el a gpslat változóban...Egyébként könnyen lehet hogy már a gps koordináták kiolvasásánál lehetne ilyen formátumra kérni az adatot, de ebben János250 kolléga lehet jobban képben van
-
#13540
tonermagus
aktív tag
Janos250
#13539
tonermagus
aktív tag
válasz
Janos250
#13539
üzenetére
Szerintem arra gondolhatott, hogy egy gps koordináta így néz ki:
11 . 22 33 44 5
Viszont az Arduinon ha dolgozni akarsz azzal a koordinátával (kiiratni, átküldeni RF-en, stb...) az utolsó számjegy elveszik és ez lesz belőle:
11. 22 33 44
Fogalmam sincs hogy ez az utolsó számjegy mennyire fontos -
#13536
tonermagus
aktív tag
zsolti_20
#13535
-
#13534
tonermagus
aktív tag
zsolti_20
#13533
-
#13529
tonermagus
aktív tag
Janos250
#13528
tonermagus
aktív tag
válasz
Janos250
#13528
üzenetére
Wow, tudtam én hogy te vagy itt a GPS mester
Nagyon szépen köszönöm az elég hasznosnak bizonyult írásod!
A leírás szerint a 8M önmagában is tudja a dm-es pontosságot, egy vevő esetén is.
- Hát ennek szívből örülnék. Viszont pont nemrég raktam össze az Ardu+Neo M8N párost és sajnos 10-20 métert sétál. Régebben is hasonló volt az eredmény, akkor TinyGPS++-t használtam, most átálltam NEOGps-re de nem javult a dolog. Bár hozzáteszem én házak között városban, az erkélyről próbálgatom. Elképzelhető hogy ezért a nagy pontatlanság? Élesben persze nyílt-sík terepen lenne használva.
Növelhető a pontosság olyan vevővel, ami a műholdak által sugárzott hibajelet is fel tudja dolgozni, ezzel dm-es pontosság érhető el. Azt hiszem, az 8M ilyen.
Ezt nem tudom elképzelni. Hogyan tudom ezt a hibát kiszámolni? És a Rover oldalon mit kezdek ezzel a hibával? Ez a hiba egy gps koordináta vagy távolság? Ez a hibajel feldolgozás hogy működik? Van erre valami függvény, funkció, parancs? Akkor az nem megoldás, hogy a "bázis" által lekért GPS koordinátát és a "rover" koordináta közötti távolságot számoltatom? Azt szeretném hogy a "bázistól" mindig ugyan olyan, vagy lehetőleg 1 méteren belüli távolságra álljon meg a "Rover"
Ha egyszer lesz időm, kipróbálom két olcsó GPS csippel, mekkora lesz a hiba. Ha Te előbb próbálod ki, kíváncsi vagyok az eredményre!
Hát ha megteszed akkor azt megköszönném! Elvileg pár napon belül lehet nekem is sikerülne összeállítani a bázis állomást, és a kettő közötti kommunikációt, de az nem biztos hogy olyan pontos mint a te mérésed Pontosságról: ahogy olvastam az Ardu platform miatt, illetve a 32bit miatt alapból nem pontos a koordináta amit megkapunk. Ez nálad nem zavar be? Vagy ez jelentéktelen? -
#13523
tonermagus
aktív tag
Tankblock
#13522
tonermagus
aktív tag
válasz
Tankblock
#13522
üzenetére
Teljesen megfelelt. Köszönöm szépen a válaszod!
Más: szeretnék összehozni egy GPS-es távolságmérőt. Ha jól emlékszem Janos250 ennek a nagy tudója...
A tervem az lenne, hogy lenne egy Fix pont, ami gyakorlatilag egy állvány lenne amin egy Arduino + NEO-6M + NRF24L01+PA+LNA kombó lenne. Illetve lenne egy mozgó tárgy, amin szintén az előbbi Arduino + NEO-6M + NRF24L01+PA+LNA kombó lenne. A fix pont beolvassa a GPS koordinátát, azt Nrf24-en továbbküldi a mozgó tárgyhoz, a mozgó tárgy szintén lekéri a saját GPS koordinátáját, majd fogja a két koordinátát és a megfelelő függvénnyel kiszámolja a kettő közötti távolságot és megjeleníti azt egy kijelzőn. Ez lenne az elképzelés
Lehetőleg szeretném elérni az 1-2m-es vagy jobb pontosságot.Viszont megfogalmazódott bennem pár kérdés:
- Melyik modul a legjobb erre a célra? Neo-6m, Neo-8m? Esetleg egy komolyabb, mint pl. ZED-f9p. Ez borzasztó drága lenne, kérdés hogy Neo-6m-el elérhető-e a kívánt pontosság.- A fix pontot azért terveztem bele, mert bízom benne hogy a két GPS ami relatív közel van egymáshoz (max. 200-300m-re egymástól) ha téved is akkor azt egy irányba teszi. Így ha azt használom origónak akkor talán nő a pontosság. Vagy tévedek? Van egyáltalán haszna ennek a fix pontnak?
- Egy Arduino Mega képes arra, hogy megfelelő sebességgel olvassa be a GPS koordinátát és ezután Nrf24-en kiküldje? Vagy lassú lesz? Illetve a kérdésem a másik oldalon is él? Elbírja a Mega hogy fogadja a másik pont GPS koordinátáját, lekéri a sajátját és kiszámolja a távolságot és kiírja egy kijelzőre? Vagy érdemes betenni arra az oldalra egy másik Ardu-t ami végezné a számítást és a kiírást és a két ardu serialon küldené egymásnak az adatot?
- Ezeknek az NRF24L01+PA+LNA-nak mekkora a valóságban a hatótávja? Próbálta már valaki? 1km elvileg a gyári adat, akkor gondolom 500m-et simán bírnia kellene
Bocsi a sok kérdésért
-
#13521
tonermagus
aktív tag
Tankblock
#13519
tonermagus
aktív tag
válasz
Tankblock
#13519
üzenetére
Csak hogy értsem is mit miért csinálok: miért van szükség arra a diódára/ellenállásra?
Azt írja, hogy ha csak 1 szenzort használok (mint pl. esetemben az arduino) akkor a diódát lecserélhetem egy 1.2K-s ellenállásra amit a Serial2 TX portjára kell tennem. Ha kihagyom a diódát/ellenállást mi történik? Ha csak a TX-et dugom be nem kellene működnie?
You need to include a diode (such as 1N4148) between the Arduino TX pin and the wire between the iBUS pin and the Arduino RX pin (cathode/solid ring of diode connected at Arduino TX pin) to handle the half-duplex protocol over the single iBUS wire. See example wiring below. If you only have one sensor connected to the iBUS (i.e. only the Arduino board) you can replace the diode with a resistor of 1.2k Ohm. -
#13511
tonermagus
aktív tag
Tankblock
#13510
tonermagus
aktív tag
válasz
Tankblock
#13510
üzenetére
Elméletileg mindent jól csináltam... Egy dolgot kivéve amit most vettem észre:
IBusSensor.begin(Serial2);helyettIBus.begin(Serial2)-t használtam
Nagyon remélem hogy ez lesz a hiba. Ahol csak szervóvezérlés van ott az Ibus.begin(Serial1)-t használja. Ahol már vegyes (szervó+szenzor) ottIBusServo.begin(Serial1);ésIBusSensor.begin(Serial2)-t használ.
Egyébként Te használtál már ilyet? Így megfelelően összerakva a távirányítón látnom kellene 2 újabb szenzort ami az Arduino által küldött növekvő sebesség és hőmérséklet változó értékeit jelenítené meg? -
#13504
tonermagus
aktív tag
tonermagus
aktív tag
SZiasztok!
Hátha ti tudtok segíteni.
Valaki vezérelt már Flysky IBUS-t Arduinoval? Az alábbi leírás szerint összeraktam, a Flysky vevő IBUS portját a Serial2-re tettem, viszont a távirányítón nem látom a szenzort
https://github.com/bmellink/IBusBM
Kicsit részletesebben: A flysky FS-ia6B vevő a +5V-ot és a GND-t is az arduinorol kapja ideiglenesen. Arduino Mega-t használok, annak a 16-17-es lábát, ami alapból Serial2 TX és RX. Ezt így kötöttem össze: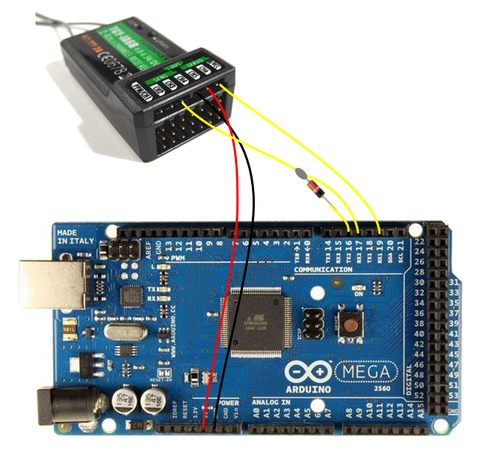
Kérdés hogy nekem kell-e ez a párhuzamosítás? Vagy Elég lenne csak a 16-os TX csatit rákötni a vevő IBUS-ra?
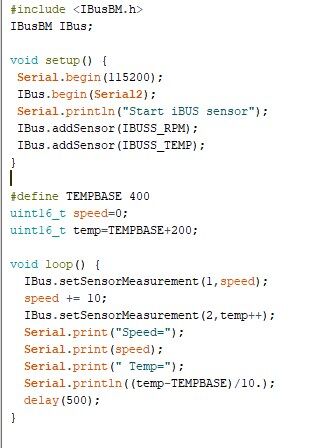
Az Arduinora feltöltöttem az alábbi kódot: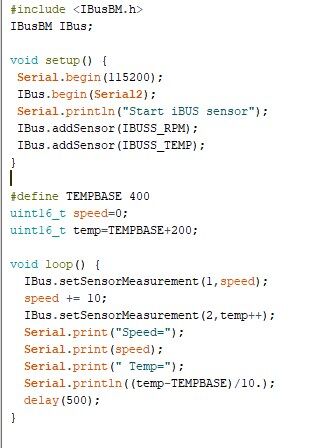
A vevőt és az adót össze bindoltam, majd az RX menüben kikerestem a látható senosokat, és sajnos ott csak a gyári 3 db szerepel, az arudioé nem
A célom az lenne, hogy az arduino generál egy számot, amit a vevő IBUS-án keresztül átküldi, majd azt a adó (Flysky FS-i6) kijelzőjén látni fogok. Ugyebár a sensorok működnek ilyen módon, tehát egy feszültség szenzor által mért értket látok az adón, de az arudino-t nem ismeri fel szenzorként, pedig a IBUSBM library elvileg pont erre való.
Ti elég nagy guruk vagytok, mit rontottam el? -
#12848
tonermagus
aktív tag
tonermagus
aktív tag
Bónusz kérdés: ezt az UBEC-t csont nélkül cserélhetem erre a Step down Power Supply-ra?
Kb. 1 amper fog átmenni rajta, azt mindkettő tudja de az UBEC kétszer annyiba kerül... -
#12847
tonermagus
aktív tag
Janos250
#12846
tonermagus
aktív tag
válasz
Janos250
#12846
üzenetére
Mostanában elég sokat hallottam az ESP szót
Lehet ideje lenne váltanom?
Ti egyébként többnyire ESP-vel játszatok, nem is Arduinoval?Megnéztem egy összehasonlítást a két típus között, és az jött le hogy a PWM frekvencia sokkal részletesebb 0-1024 az ardu 0-255-jéhez képest ezzel gyakrolatilag egy átmapoló parancsot spórolnék meg és finomabb lenne az átmenet a LED szalag színei között... Elvileg állítható a frekvenciája is, így megszűnhet a "zúgás". Kérdés hogy ha ezt piszkálgatom akkor minden eszköz ugyan úgy fog működni?
Az hogy wifi van rajta számomra nemigen érdekes. Illetve az univerzális i2c pinek sem érdekelnek.
Viszont kicsit aggaszt a kompatibilitás. Teljesen megszoktam az Arduino library rendszerét. Bármi kell szépen leszedtem a library-t és minden happy volt. Ez az ESP nem tudom mennyire támogatja ezeket.
Illetve ami még kérdéses a tápellátás. Ahogy látom az ESP-k ~3V-ot használnak. A legtöbb eszköz amit vezérlek 5V-ot igényel. Ez nálatok nem okoz gondot?
-
#12844
tonermagus
aktív tag
tonermagus
aktív tag
Illetve a D6-on pedig beolvasom a gázkar állását a távirányítóról PulseIn()-el
-
#12843
tonermagus
aktív tag
Aryes
#12841
tonermagus
aktív tag
Aztaaa... Erről még nem is hallottam!
Hát most átnéztem a kódot amit használtam eddig a WS2812-vel, és az egyik LED szalagot a D9-en, a másikat D10-en vezérlem, a motort (Servo Library) pedig D5-ön. Ez okozhatott galibát?
Jah igen, és Nano-t használok
János250: Sajna nagyon limitált a helyem, már az Uno sem fér be, nem hogy egy Mega. Vagy te milyen lapra gondoltál? -
#12840
tonermagus
aktív tag
Janos250
#12838
tonermagus
aktív tag
válasz
Janos250
#12838
üzenetére
Rosszul fogalmaztam: maga a LED kiírással nincs gondom. Szépen csinálja, bármennyi LED-el. A gond akkor kezdődik amikor mellette még Szervót is vezérlek... A LED vezérléssel minden ok, de a szervó elkezd izegni-mozogni. ÉS ez elvileg jól ismert probléma a WS2812-nél. Épp most találtam rá megoldást, sűrű servo detach + ritkább LED kiírás. De jól látszik hogy nekem ehhez nem jó megoldás ez a LED. Az 5050-nek van valami hátulütője?
"A 12V-os led szalagokon a chipek hármasával vanna sorba kötve."
Teljesen jogos, most néztem csak. Jó, akkor 9 vagy 12 LED lesz egy szalagon. Még elválik hely szempontjából melyik lesz.
"A rajzodon a szalag pozitív tápja a panel 9V-os pontjára van kötve"
Igen, oda is írtam, hogy külső tápról megy majd, nem az arduo VIN-jéről. -
#12835
tonermagus
aktív tag
Aryes
#12832
tonermagus
aktív tag
Köszönöm a válaszokat!
Sok minden világos lett, viszont még mindig teljesen homály, hogy a LED szalag R-G-B lábai azok GND vagy +12V-ként értelmezhetőek? Ha +12V akkor hol a GND... Ha GND akkor miért sül meg a 12V-ra kötve, gondolnám hogy a GND az amúgy is 0... Na jó, tudom hülye kérdés, de tényleg nem vágom
Illetve ahogy mondtam 2 db LED szalagot hajtok meg, mindkettőt ugyan olyan színnel vezérlem egyszerre. Spórolva az Arduino lábain, illetve a MOSFET-eken - elkövethetem-e az a merényletet, hogy egy MOSFET középső lábára midkét LED szalag egy színét ráköthetem? És ezt nyilván eljátszanám a másik kettővel is, így 6 MOSFET helyett 3 kellene csak, és ugyan ennyi Ardui kimenetet is spórolnék -
#12831
tonermagus
aktív tag
tonermagus
aktív tag
Érkeztem még egy fantasztikus kérdéssel
Jelenlegi projektemben dobnom kell a jól bevált, és régóta használt WS2812B-t.
Pofonegyszerű volt a bekötése/használata, de a megszakításkezelés botrányos. Iszonyat nagy erőforrás kell neki. Így váltottam 12V-os 5050 chipsetes RGB LED-szalagra.A vezérlés megírásával talán nem lesz gond. A bekötésével már annál inkább. Találtam a neten egy képet hogyan is akarnám bekötni:
(Talán annyi különbséggel, hogy én közvetlenül +12V tápról hajtanám nem Ardu VIN-ről)
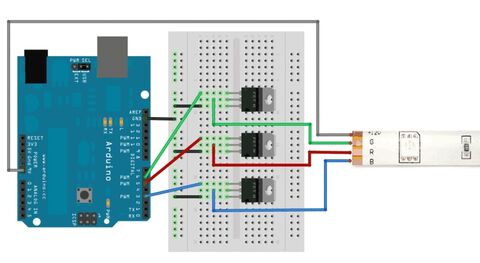
Mivel elektronikában (IS) hülye vagyok segítsetek már légyszi. Én naív azt hittem rákötöm az Ardu 3 lábát direktben a R-G-B portokra a szalagon, de gondolom ez nem jó ötlet, nem véletlenül van ott az a 3 mosfet a rajzon
 Ezek mi célt szolgálnak?
Ezek mi célt szolgálnak?2*10 db LED-et (17 cm szalag) akarok meghajtani, ennek gondolom szinte semmi az áramfelvétele, talán még 1A sincs/kimenet, azt meg az arduino elbírja, vagy nem? Kell ez a mosfet? (tegyük hozzá nem tudom mire való, csak azt hogy nyűg, mert a két szalaghoz 6db-ot kell vennem és forrasszgatnom + helyigényes)
Milyen típusút vegyek? Van egy helyi bolt ahol árulnak ilyet, de ha nem kapok infót és odamegyek tuti keresztkérdéseket fognak feltenni...
+ egy extra kérdés: a szalagon nincs GND... Jól gondolom hogy az R-G-B szálak mind egytől egyig GND-ként funkcionálnak? Vagy hogy van ez? -
#12800
tonermagus
aktív tag
KFORboy
#12799
tonermagus
aktív tag
válasz
 KFORboy
#12799
üzenetére
KFORboy
#12799
üzenetére
Na én nem félek megkérdezni semmit
Inkább feladom a büszkeségem és rákérdezek egy olyan dologra ami másnak tök triviális minthogy órákig keresgéljem mit is akarok
Látjátok, itt is pár perc alatt megkaptam a választ... Egy kis negatív kritikát meg beleférAmúgy meg sosem voltam rossz matekból, és az sem igaz, hogy majdnem megbuktam, de basszus, mikor tanultam én ezeket. Lehet hogy tök alap dolog, de eddig is megvoltam enélkül
Az általános iskolás tananyagnak a 90%-át már tuti elfelejtettem, Mitokondrium, éghajlati övezetek, mi a különbség az eposz és históriás ének között... Tudja a fene már Csak hogy valami értelme is legyen a hozzászólásomnak: nekem teljesen új ez a ThinkerCAD féle Arduino szimulátor... Gyors ki is próbáltam vele az abs() függvényt
-
#12793
tonermagus
aktív tag
tonermagus
aktív tag
Sziasztok!
Létezik olyan parancs, amivel kiszámolhatom a két szám közötti különbséget pozitív végeredménnyel?
Nyilván megoldhatnám egy szimpla kivonással illetve két "if" függvénnyel, amivel megnézem hogy a két szám közül melyik a nagyobb, és abból kivonom a kisebbet. De ezt nem érzem elég elegánsnak. Létezik erre valami? -
#12433
tonermagus
aktív tag
tonermagus
aktív tag
Sziasztok!
Nem tudjátok véletlenül, hogy ez a relé amit belinkelek 9-10V környékén is kapcsol-e?:
https://www.hestore.hu/prod_10036570.html
Elvileg ez 12V-os relé, de mivel az áramkört egy 11,1-es lipo akksi fogja meghajtani így szinte mindig 11V alatt lesz a feszültség és lehet be fog esni 10V alá is. (tudom hogy ez kritikus szint egy 3 cellás liponál, de ez most nem lényeges ) -
#11968
tonermagus
aktív tag
tonermagus
aktív tag
Akkor erre senki ?
Nem tudom eldönteni, hogy ennyire nehezet kérdeztem vagy ennyire hülyeséget..Plusz kiegészíteném egy kérdéssel: Egy ~1A felvételű LED szalagnak mekkora AWG kábelt ajánlatok(a lehető legvékonyabb kellene ami még elbírja, a neten pedig eltérő értékeket találni)? Illetve egy szervó kábelét szeretném jumper kábellel megtoldani, szerintetek elbírja a jumper kábel a max. 1,2 A körül áramerősséget (többnyire 1A alatt lenne)?
-
#11957
tonermagus
aktív tag
Aryes
#11956
tonermagus
aktív tag
Nagyon szépen köszönöm a leírásokat!
Akkor most a konkrét kapcsolás: (bocsi, munkaidőben vagyok, erre futotta )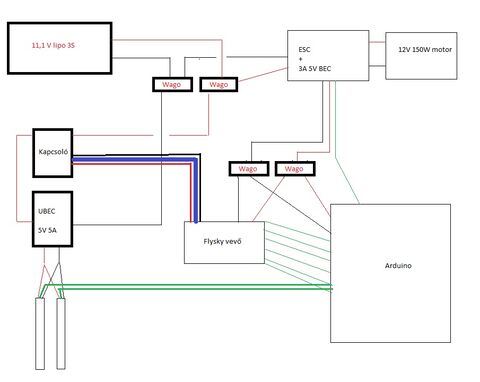
Bocsánat, elsőre nagyon kusza lehet (sokadjára is) a lényeg:
- A betáp egy 11,1V-os 3 cellás lipo 20C kisütéssel
- A lipo kábeleit Wago féle kapoccsal kettéosztom.
Bal oldali ág:
A fázis egy kapcsolóhoz megy, ami a másik ág vevőjéről kapja a vezérlést (Távirányítóról akarom kapcsolni az alsó ágat)
- A kapcsolóból továbbmegy egy UBEC-hez, ami a bejövő 11,1V-ot átalakítja 5V-ra.
- Erről az UBEC-ről kapja a tápot a 2db LED szalag (5V-os címezhető LED szalag).
- A led szalag vezérlése pedig a másik ág Arduinojáról érzekik.
Jobb oldali ág:
A wago féle kapcsolóból kapja a 11,1V-ot az ESC+BEC. Ez vezérli a motort, illetve a BEC ágán keresztül (ami szintén 11,1V-ról 5V-ra alakít) kettéosztva megy az Arduinohoz és a Flysky vevőhöz. Ennek egy csatornájára van rákötve a másik ág kapcsolója. Az arduino pedig a beérkezett jelek alapján vezérli a LED szalagot. Magától értetődő hogy a bal oldali ág csak akkor lehet áram alatt ha a jobb oldali ág is áram alatt van hiszen innen kapja a kapcsoló a jelet.
Kérdés: hova kössem az arduból a GND-t a másik ágban hogy működjön a LED vezérlés? UBEC után- LED elé tegyek be egy WAGO-t, és ott közösítsem?
Egyébként meg ez a kapcsolás jó? Leéghet valami?
Mellékág, egyáltalán nem fontos, csak hogy értsétek:
Hogy a kapcsolót miért a másik ágon lvő vevőről vezérlem?
1 kapcsoló lehet csak az egész áramkörben ami az ESC-be beépített kapcsoló lesz. A másik LED-es ágat is szakítani akarom, de mivel 1 kapcsoló lehet az nem jöhet szóba, közvetlenül a lipo után meg nem építhetek be kapcsolót, mert nem nagyon van olyan, ami elbír 20-30 ampert és esztétikus -
#11953
tonermagus
aktív tag
Aryes
#11952
tonermagus
aktív tag
Köszi, a közös test tényleg megoldotta a problémát
De ha már itt tartunk azt el tudná valaki magyarázni, hogy miért kell a közös test?
Laikusként számomra ez két külön áramkör, amit csak a SIGNAL kábel köt össze. Azt gondolnám ,hogy a ledszalag megkapja a tápot, a signal kábelen amúgy is csak adat van... -
#11951
tonermagus
aktív tag
tonermagus
aktív tag
A kapcsolást elfelejtettem belinkelni...
Jah, egyébként más fórumon azt mondták valszeg az a baj, hogy nincs közös testen az Arduino és a szalag...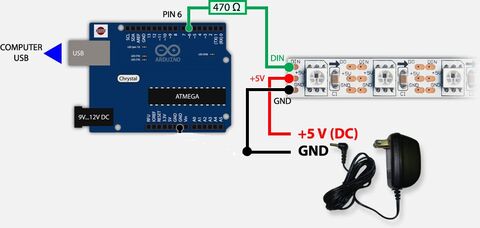
Jelenleg így néz ki a kapcsolás.
Nincs közös test tényleg, de a program mégis működik, feltölti a ledeket, csak sokat hiábádzik... Sok a villogó, színt tévesztő LED, stb... Ez lehet a közös test hiányától?
Jah, és ellenállást se kötöttem be, de az elvileg csak a hangszűrés miatt kell? -
#11950
tonermagus
aktív tag
tonermagus
aktív tag
Ma megjött a játszós LED szalagom. Egy WS2812B-ről van szó. Írtam egy tök egyszerű kódot, ami elvileg az első 30 LED-et kékes színben világítja meg. Sajna ez történik:
Mit ronthattam el? Egy Lipo aksiról táplálom a szalagot +5V és GND van bekötve, a szignált pedig a PC USB kábeljéről táplált Arduino UNO-ról kapja a 10-es PIN-ről.
Össze-vissza villog, megjelennek olyan színek amilyeneknek nem kellene, stb...
#include <FastLED.h>
#define LED_PIN 10
#define NUM_LEDS 30
#define COLOR_ORDER RGB
#define LED_TYPE WS2812B
#define MAX_BRIGHTNESS 150
#define MIN_BRIGHTNESS 20
struct CRGB leds[NUM_LEDS];
void setup() {
LEDS.addLeds<LED_TYPE, LED_PIN, COLOR_ORDER>(leds, NUM_LEDS).setCorrection(TypicalLEDStrip);
FastLED.setBrightness(140);
}
void loop() {
for(int i = 0; i < 30; i++) {
leds[i] = CHSV(200, 255, 255);
FastLED.show();
delay(100);
}
}Szerintetek ez miért van?
-
#11847
tonermagus
aktív tag
tonermagus
aktív tag
Sziasztok!
Ez a kapcsolás jó szerintetek? Gondolok itt arra, hogy az 5V illetve GND-k jól vannak-e bekötve, nincs-e rövidzár, a kapcsoló jó helyen van-e, stb? Nem akarok még egy ESC-et elfüstölni
Most vettem észre, hogy két hiba is van a képen: az ESC PWM nélküli pinoutra van kötve és a flysky vevő nem kap földet. Ezeket javítom...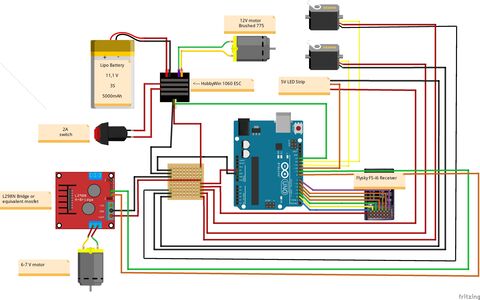
Nagyban KATT IDE!
Ugye az elképzelés az, hogy a 11,1-es lipóról csak a 12V-os főmotor kapja meg a full feszültséget, BEC-en keresztül 5V-on táplálok meg minden mást. Lesz a kapcsolásban egy kisebb motor amit szintén 5V-on hajtok meg TB6612FNG-n keresztül. A képen még L298N van, ez ne tévesszen meg. Illetve remélem, hogy ez a kis 5V-os motor áramfelvételét elbírja ez a vezérlő. Ez a motor csak ritkán, és rövid ideig fog forogni. Lesz még egy 5V-os led szalag, 2 szervó és maga a távirányító vevője.
Ez így működhet? -
#11838
tonermagus
aktív tag
tonermagus
aktív tag
A távirányító vevőjén van egy olyan port, hogy I-bus... Erről tudtok valamit? (Flysky FS-i6)
Csak reménykedem benne, hogy ezen az egy porton lehet kinyerni az összes csatorna adatát. Ugye jelenleg egy 10 csatornás vevővel dolgozok, és hogy mind a 10 csatornát feldolgozzam egyértelműen lefoglalok az arduinon 10 input PIN-t.
Vagy mire való ez az i-bus? -
#11832
tonermagus
aktív tag
tonermagus
aktív tag
Ne eresszük el a GPS-es témát, mert nagyon érdekel, főleg Janos250 véleménye, de:
Az arudinon ugye most nem emlékszem pontosan de talán 2 vagy 3 5V-os kimenet van. Hogyan lehet megoldani elegánsan hogy akár 5-6 5V-os tápot ki tudjunk adni? A próbapanel nem jó mert kirázódik belőle, valamilyen csavaros megoldás létezik? hogy hívják? -
#11828
tonermagus
aktív tag
Janos250
#11826
tonermagus
aktív tag
válasz
Janos250
#11826
üzenetére
deciméteres pontosság???? Ember! Én már fél méteres pontosságtól is hanyatt dobnám magam
Te elég profi vagy ebben úgy látom, szóval mi kellene ahhoz hogy min. 1m pontosságot tartani tudjak? Nagyjából (1m belül) vissza akarom küldeni az elmentett pozícióra az RC hajót... -
#11821
tonermagus
aktív tag
Janos250
#11818
tonermagus
aktív tag
válasz
Janos250
#11818
üzenetére
Köszi a részletes beszámolót.
Elég sokat olvasgattam azóta, és én is azt találtam, hogy ilyen kis fix GPS "tányérokat" kell letenni egy pontra, és attól számolni...
Kérdés viszont, hogy ez a fix gps is ugyan akkorát téved-e, vagyis inkább ugyan abba az irányba téved-e és ugyan akkorát? Ez nagyon fontos.
Próbáltad már? -
#11814
tonermagus
aktív tag
Gergosz2
#11810
tonermagus
aktív tag
válasz
 Gergosz2
#11810
üzenetére
Gergosz2
#11810
üzenetére
Erre én is gondoltam, ahogy megjön a kínából rendelt gyorsulásmérőt teszek vele gy próbakört.
MÁS... Tuti kiröhögtök (esetleg még rám is köptök) de : vettem egy kapcsolót ami 2A-es... Ezzel szeretném az egész elektronikát ki/be kapcsolni, tehát egy főkapcsoló lenne... Első kérdésem hogy mit szakítsak meg vele? a fázist vagy a földet... Valahol olvastam, hogy talán a földet célszerűbb.
Második kérdés: az áramkörben lesz egy DC motor ami felzabál vagy 20-30 A-t, előtte egy motorvezérlő, előtte pedig az akksi. Az akkumulátor és a motorvezérlő közzé tenném nyilván a kapcsolót, kérdés hogy a motor nagy (20-30A) áram felvétele miatt megsülne-e a kapcsoló(2A)?
Tudom-tudom, kurva ciki kérdés -
#11807
tonermagus
aktív tag
Teasüti
#11806
tonermagus
aktív tag
-
#11805
tonermagus
aktív tag
Aryes
#11804
tonermagus
aktív tag
Köszi a tippet, ezeket mindenképpen megpróbálom.
Bár az is eléggé aggaszt, hogy volt olyan, hogy elsétáltam 25 méterre a céltól. vártam picit, majd elindultam vissza... szépen számolt egészen 15m-ig, majd miközben ugyan olyan sebességgel haladtam visszafele elkezdett felfele számolni 40-50-ig, majd mikor megálltam a célnál rá pár másodpercre kezdett el csökkenni ismét, és kb. 20sec után talált vissza a ~4-5m-es távolságra -
#11803
tonermagus
aktív tag
Gergosz2
#11802
tonermagus
aktív tag
-
#11801
tonermagus
aktív tag
tonermagus
aktív tag
GPS-el próbálkozott már valamelyikőtök?
Egész hétvégén próbálgattam, de sajna nem jött be amit akartam. Két GPS koordináta távolságát akartam megmérni. Az elképzelésem az volt, hogy gombnyomásra elmentem egy változóba az aktuális GPS koordinátát, majd folyamatosan számolom a jelenlegi és az elmentett koordináta (CÉL) között távolságot. Ugye erre jó a Harvesin formula, illetve a TinyGPS++ libary alapból tud egy DistanceBetween funkciót, ami szintén erre szolgál. A problémám az volt, hogy egy helyben állva ha lenyomtam a gombot akkor ugye a jelenlegi pozícióm megegyezett a CÉL pozícióval, tehát a mért távolság méterben kb. 0-1 kellett volna hogy legyen. És ez kb. 10 másodpercig így is volt, utána elkezdett csalni 4-5 métert is akár úgy hogy meg sem mozdultam. Ettől függetlenül működött a dolog, messzebbre eltávolodva érzékelte hogy távolodom, de itt is csalt. Sőt, néha a szokásos 4-5 méter helyet felugrott 20m-t is. aztán vagy visszament vagy nem
Serialon leolvastam a jelenlegi pozíciót és láttam hogy az aktuális pozíció mozdulatlanul is jelentősen ugrál, nyilván ez okozza ezt a pontatlanságot.
Kérdés hogy miért van ez, illetve lehet-e orvosolni?
- NEO-6M GPS vevőt használok, elég olcsó volt, kérdés esetleg egy drágább megoldás kevésbé ugrál-e?
- Nagyobb antenna felrakásával szintén javulhat-e az ugrálás?
- Törődjek bele, hogy +/-10 méter a legtöbb ami kihozható belőle? (Bár ezt kötve hiszem, neten elég sok videó van, ahol +/-1méter a kilengés ami nekem tökéletes lenne)Jah, a kód amit használok tuti jó, TinyGPS++ sample-t használtam, NEOGPS-el is próbáltam (nem kis idő volt működésre bírni és megérteni), és ezen kívül írtam sajátot, lekoppintottam 3-4 másikat is, teljesen mindegy volt... Minden működött csak a pontatlanság maradt...
Itt egy videó róla működés közben... https://streamable.com/20n75
Az az oszlop ahol a kurzor áll a távolság a ponttól... Jól látható az ugrálás. Illetve az első oszlop pedig a regisztrált satelitek száma. (7-8-9db)... Akkor érdemes nézni amikor újraindítom... (VÉGIG egy helyben álltam!) -
#11736
tonermagus
aktív tag
DigitXT
#11735
tonermagus
aktív tag
válasz
 DigitXT
#11735
üzenetére
DigitXT
#11735
üzenetére
Szóval én azt feltételezem, hogy az a motor amit belinkeltem és az üresjárati áramfelvétele 1-2A, terhelés hatására megnöveli az áramfelvételét akár 25A-re (ezen videó szerint) és ez pedig kicsinálja az L298N-t. Ez így van?
Ha igen milyen H-híd van, ami elbír 20-30A-t és esetleg megbirkózik a bekapcsoláskor jelentkező ennél is magasabb A-al?
-
#11732
tonermagus
aktív tag
tonermagus
aktív tag
Etetőcsónakról van szó amúgy.... Bár az is max. 7-8 kg
Jó, az a 2100W tényleg elég meredeken hangzik még nekem is, de a 150W-ost hihető, mivel több helyről hallottam már...
Egy gond van már csak: az alap kérdésemre még mindig nem kaptam választ

-
#11727
tonermagus
aktív tag
robohw
#11726
tonermagus
aktív tag
válasz
 robohw
#11726
üzenetére
robohw
#11726
üzenetére
Hát megfogtál, nem igazán vagyok tisztában azzal hogy egy 150W-os motor mire képes...
Az igazat megvallva én abból indultam ki, hogy megkérdeztem egy srácot aki ezzel foglalkozik hogy ő milyen motorokkal szereli az RC csónakokat, és azt mondta hogy 3 fajta változattal: 910W-os, 1600W, 2100W-os motorral szereli őket. Bár ő Brushless motorokat használ, nem tudom az ebből a szempontból különbözik-e egy szénkefés motortól...
-
#11724
tonermagus
aktív tag
robohw
#11723
tonermagus
aktív tag
válasz
robohw
#11723
üzenetére
Hűűűhaaa.... Röstellem de nem értek az elektrotechnikához, úgyhogy ez mit is jelent halandó ember számára?
Illetve azt értem hogy azt írod egy nagyobb feszültségű motor kisebb amperrel éri el az adott teljesítményt mint a kisebb feszültségű, de ez hogy kapcsolódik az én kérdésemhez?Elbírja ezt a 150w-os motort?
-
#11722
tonermagus
aktív tag
Aryes
#11721
tonermagus
aktív tag
Na ezt megpróbálom.
Egyébként most kicsit aggódom, mert utánaolvastam a dolgoknak. Azt még nem mondtam hogy egy ilyen 12V-os 775-ös motort szeretnék meghajtani az L298N-el, vagy hasonló társaival. A gond az hogy ezek a H-hidak 2A-t tudnak max, ezeknek a motoroknak az áramfelvétele üresjáratban kb ennyi. Gondolom terhelés alatt ez jelentősen megnő és tuti átlépem a 2A-os küszöböt amit a H-híd tud, sőt egy videó alapján terheléskor egy ilyen motor akár 24A-t is felvehet. Ezzel tuti kinyírom a vezérlőt, ugye?
Most már értem miért kell ESC az RC hajók vezérléséhez. Azok akár 60A-t is elbírnak.
Tudtok esetleg olyan H-hidat ami elbírja egy ekkora teljesítményű motor áramfelvételét?
-
#11720
tonermagus
aktív tag
DigitXT
#11719
tonermagus
aktív tag
válasz
DigitXT
#11719
üzenetére
Köszönöm a válaszokat!
Akkor megnyugodtam hogy nem a kapcsolással van a gond, hanem egyszerűen a 9V-os elem nem bírja a tempót. Ennek nagyon örülök, mert ezt a 9V-os elemet csak a próbára tettem bele, nyilván 11,1 V-os 3S liPo-val fogom meghajtani a motort.
Viszont ha már a liPo-nál tartunk: ez a L289N-en van egy jumper. Ha 12V alatti a betáp akkor bent lehet hagyni mert így előállítja az 5V-ot amiről meg tudom táplálni az arduino-t. Viszont a 11,1 3S-es liPonak csak a névleges feszültsége 11,1. Teljesen feltöltve ~12,8V körül mozog. Ez azt jelenti hogy ezzel ki is nyírom a L289N-t?
-
#11717
tonermagus
aktív tag
Aryes
#11715
tonermagus
aktív tag
Sajna a Fritzing-ben nem találtam ezt a fajta L289N vezérlőt, így nem tudtam szépen megrajzolni, de linkelek egy képet. Hasonlóan kötöttem be annyi különbséggel, hogy az ENA és ENB lápakat nem vezettem ki az Arduinora hanem hagytam rajta a jumpereket, illetve az 5V-os kimenetre nem kötöttem rá az Arduino VIN lábát. Viszont az L289N GND kivezetést plusszba rákötöttem az Arduino egyik GND lábára (ha jól emlékszem csak így forog a motor és a lenti rajzon is így van).
Illetve gondolom az mindegy, hogy a motor-t milyen polaritással kötöm rá az L289N-re....
Egyéb infó:
- az elem nem mertül le, továbbra is 8V+ van benne.
- ami érdekes volt, hogy szépen lement ~6V-ról pár másodperc alatt 2V alá. Ha kikapcsoltam, vártam picit akkor kicsit magasabb V-on pörgött mint amikor kikapcsoltam. Minél többet vártam két beindítás között annál magasabb V-ról indult. Melegedést nem éreztem sehol a nyákon.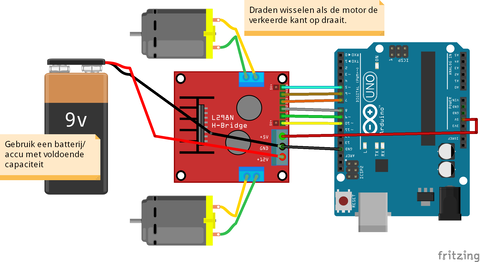
-
#11714
tonermagus
aktív tag
Aryes
#11713
tonermagus
aktív tag
Ahogy sejtettem, a programmal nincs gond, és úgy tűnik hogy az L289N-t sem sütöttem meg mert ma megpróbáltam újra és működött... Viszont azt figyeltem meg, hogy 10 sec folyamatos terhelés mellett hirtelen a motor elkezdett jelentősen lelassulni.
Szeretem végre műszert és kimértem a feszültséget, 6V környékén működött bekapcsoláskor, majd 10 sec után elkezdett lecsökkenni egészen 1,2V-ig mértem...
Normális ez a hatalmas feszültségesés? Miért lehet ez?
Egy 9V-os elemről működtettem ezt a 3-6V-os kis DC motort... -
#11712
tonermagus
aktív tag
Aryes
#11711
tonermagus
aktív tag
Köszönöm a sok segítséget!
Igen, megírtad és meg is jegyeztem
Sajna még csak az L289N jött meg, így egyenlőre azzal játszom.Viszont tegnap érdekes dologra lettem figyelmes: A bal oldali motor sokkal gyorsabban forog mint a jobb oldali... A jobb szinte csak meg-meg fordul. Pedig a kód tuti jó, ugyan az mint a bal oldalinál, csak nyilván IN1-IN2 helyett IN3-IN4-re küldi a vezérlést eltérő feltételnél az Arduino. Kipróbáltam másik motorral is ugyan azt produkálja.. Sőt egy idő után már meg sem mozdította a motor-t csak az Arduinon világít a beépített LED (a bal oldali működtetést közben nem világít, tehát ez tuti jelez valamit). Ez mitől lehet?
-
#11708
tonermagus
aktív tag
Aryes
#11693
tonermagus
aktív tag
Elméletileg Szénkefés és Szénkefe nélküli motorokhoz is van ESC...
Nekem is az jött le hogy ez gyakorlatilag egy H-híd, elvileg csak annyi a dolga, hogy a forgásirány és sebességet szabályozza. Nem vagyok nagy elektroműszerész guru, de úgy gondolom ezt az L289N is tudja (bocsi, hogy mindig ezt hozom fel, de nekem ilyen van, ezért példálózok vele) hiszen azzal is lehet irányt, és PWM-en keresztül sebességet is állítani... Tehát akkor ergo nincs szükségem ESC-re, ugye?illetve még egy kérdés: tegyük fel ha nem korlátozom PWM-el a sebességet, 11,1 V-os LiPoról működtetem az L289N-t akkor mekkora V-ot nyom ki a motorra? Lejön az a kb. 2V-os veszteség, és ~9,1V-on pörgeti a motort vagy leredukálja 5V-ra? Ezt nem vágom és műszerem sincs megmérni
Csak azért mert jelenleg egy 3-6V-os motort kötöttem rá Jah, és ha nem mondtam volna még akkor hülye is vagyok az elektronikához
Egyébként ma jött meg az arduino kezdőszettem és tök büszke vagyok rá, hogy pár óra alatt kiépítettem egy áramkört, amivel egy joystick segítségével 2 motort irányítok L289N-en keresztül
-
#11678
tonermagus
aktív tag
tonermagus
aktív tag
Sziasztok!
Egy szénkefés DC motorhoz használt ESC-et jól sejtem hogy teljes egészében lehet helyettesíteni egy L289N vagy TB6612FNG-el? Ezekben is van BEC, tehát táplálhatóak róla a szervók és Arduino ugye?
Mert akkor nem költök 7.000 Ft-ot egy ESC-re ha egy 1.200 Ft-os TB6612FNG-is meg lehet oldani ugyan azt...
-
#11657
tonermagus
aktív tag
tonermagus
aktív tag
Halihó!
Lehet hogy kicsit túlbonyolítom a dolgokat, hátha tudtok benne segíteni:
Sajnos még sok mindenem nincs meg hozzá, így csak elméleti szinten próbálom összerakni:Motorcsónak projekt.Flysky távirányító 6 csatornával. A vevő egység 6 csatornáját rákötöm rákötöm az arduinora 6 pontjára bemenetként feldolgozásra. Az arduino-t 2 output lábát pedig összekötöm kettő ESC signal portjával. A két ESC-et megtáplálom egy LiPo-ról és 1-1 ESC-re rákötök 1-1 BLDC motort. Az egyik ESC-ről pedig megtáplálom az arduino-t 5V-on.
Kérdés hogy hibás-e valahol ez az elméleti elképzelés? 1 lipo-t hogy/mivel tudok összekötni két ESC-el?
Illetve szeretnék még 2 servo-t is meghajtani. Azt ebben az elképzelésben elég csak rákötni az arduino 2 pwm-es portjára? Vagy azt meg kell hajtani valamivel?
-
#11622
tonermagus
aktív tag
zsolti_20
#11614
tonermagus
aktív tag
válasz
 zsolti_20
#11614
üzenetére
zsolti_20
#11614
üzenetére
Nem még, nagyon szépen köszönöm!
Sokat tanultam belőle, és még laikus számára is érthető a nagy része.
Viszont 2 dolgot nem vágok alapvető elektrotechnikai ismeretek hiányában:- Mi célt szolgál az áramkörben a motor elő bekötött Tranzisztor és Kondenzátor?
Csak tippelek, hogy az egyik védi az arduino-t a kisüléstől?
-
#11608
tonermagus
aktív tag
Aryes
#11607
tonermagus
aktív tag
Wow köszi!
Most még párszor átolvasom hogy értelmezni tudjam, de pl. fogalmam sem volt ilyenekről, hogy feszültségesés, stb... Lesz még minek utána néznem.
Ettől függetlenül az általam megrendelt L298N is tudok dolgozni csak rosszabb lesz a hatékonysága? Sima pici DC motorokat rendeltem hozzá. Ezekkel csak tesztelni akarom a programot (előre-hátra menet, gyorsítás, lassítás). Rendeltem belőlük vagy 10-et, ha esetleg leégetem őket
-
#11606
tonermagus
aktív tag
tonermagus
aktív tag
Először is köszi szépen mindenkinek a válaszokat!
Szépen haladok a projektemmel. Viszont most a motorokkal kapcsolatban kellene egy kicsit felvilágosítani: létezik ugye szénkefés és szénkefe nélküli motor. Nyilvánvaló, hogy tartósság miatt célszerű lenne szénkefe nélküli motort vennem. Kb. 3-4 kg-os hajótestet kellene elvinnie, szerintetek ekkora súlyhoz min. mekkora motor ajánlott szénkefés és szénkefe nélküli motor esetében? Jah, és ami még fontos, hogy 2 db motort szerelnék be, tehát Tank szerű irányítása lenne...
Illetve létezik szabályzó (ESC) is a motorokhoz. Azt értem, hogy ezzel lehet szabályozni a motor fordulatszámát de kérdés az, hogy ezt egy ILYENNEL tudom-e helyettesíteni?
Mint már mondtam eléggé kezdő vagyok, ezt úgy képzeltem el, hogy attól függően, hogy a távirányítón az analóg kart mennyire nyomom előre az arduino megmondja a ennek a Stepper Motor Driver-nak, hogy mekkora feszültséget adjon a motorokra, így érve el a motor gyorsulását.
Kérdés hogy ezek a szénkefés/nélküli motorok feszültség hatására gyorsulnak-e, illetve ez a stepper motor driver tud-e ilyet szabályozni
-
#11591
tonermagus
aktív tag
robohw
#11590
tonermagus
aktív tag
-
#11589
tonermagus
aktív tag
tonermagus
aktív tag
Halihó!
Távirányítós hajót szeretnék építeni. Kérdésem hogy mivel járok jobban:
- Veszek egy bármilyen gagyi RF távirányítót (pl: ILYET), plusz egy RF vevő+arduino kombó-t a vevő oldalra.
- Vagy veszek egy ILYET ami elvileg szintén összeköthető az arduinoval, és magán a távirányítón rengeteg programozható gomb van. Kérdés hogy ezeket az arduinoval fel tudom-e dolgozni? PL. fények bekapcsolására, stb... -
#11421
tonermagus
aktív tag
robohw
#11420
-
#11413
tonermagus
aktív tag
tonermagus
aktív tag
Sziasztok!
Még kezdő vagyok - elnézést a bugyuta kérdésekért - egy kis tanácsot szeretnék kérni tőletek:
- Egy ILYEN érzékelő párosnak mind a két oldalán kell hogy legyen Arduino? Egy rezgésérzékelőt akarok távolról (kb. 20m) figyelni. Az adó oldalon elég egy rezgés érzékelő + RF adó páros?
- Létezik-e ilyen kis mini arduino, amin lekezelhető a fent felvázolt rezgésérzékelés RF-en keresztül?
SZERK: Időközben találtam egy Mini Arduino nevű kütyüt... Ha jól gondolom ehhez kell egy USB adapter bővítmény, hogy programozni lehessen.



 Jó, ki tudnám googlizni
Jó, ki tudnám googlizni 

 Ha adsz egy címet akkor a belgasörmestertől küldök is
Ha adsz egy címet akkor a belgasörmestertől küldök is 




 Ezek mi célt szolgálnak?
Ezek mi célt szolgálnak?











Új hozzászólás Aktív témák
 ekkold
ekkold- Futás, futópályák
- VR topik (Oculus Rift, stb.)
- Milyen okostelefont vegyek?
- HiFi műszaki szemmel - sztereó hangrendszerek
- Spórolós topik
- One otthoni szolgáltatások (TV, internet, telefon)
- Építő/felújító topik
- Bundle topik
- Otthoni hálózat és internet megosztás
- Kazy Computers - Fehérvár - Megbízható?
- További aktív témák...

- 170 - Lenovo Legion Pro 7 (16IRX9H) - Intel Core i9-14900HX, RTX 4090
- magyar billentyűzet - 165 - Lenovo Legion Pro 7 (16IRX9H) - Intel Core i9-14900HX, RTX 4080
- 164 - Lenovo Legion Pro 7 (16IRX9H) - Intel Core i9-14900HX, RTX 4090
- Microsoft Surface Hub 2s - Interaktiv 4K monitor/ All in one PC - I5 8. generációs - Piaci ár alatt
- Benq - LU951- 5000 Ansi Lézer projektor - Piaci ár alatt
- HIBÁTLAN iPhone 14 Plus 128GB Purple -1 ÉV GARANCIA - Kártyafüggetlen, MS3659, 100% Akksi
- BESZÁMÍTÁS! GIGABYTE B250M i5 7400 16GB DDR4 512GB SSD RX Vega 64 8GB DEEPCOOL Tesseract BF 650W
- Eladó szép állapotban levő Samsung Galaxy A12 4/64GB kék / 12 hónap jótállás
- PS5 PlayStation 5 Slim (lemezes, 1TB) kiváló állapotban! 6 Hónap Jótállás
- BESZÁMÍTÁS! Intel Core i7 6700K 4mag 8szál processzor garanciával hibátlan működéssel
Állásajánlatok

Cég: Laptopműhely Bt.
Város: Budapest

Cég: PCMENTOR SZERVIZ KFT.
Város: Budapest