Hirdetés
- Milyen okostelefont vegyek?
- Xiaomi 15T - reakció nélkül nincs egyensúly
- Garmin Forerunner 965 - csúcs
- Beépül a Nano Banana a Google Fotókba
- Motorola Edge 70 - többért kevesebbet
- Samsung Galaxy A54 - türelemjáték
- Google Pixel topik
- Samsung Galaxy S23 és S23+ - ami belül van, az számít igazán
- Honor 200 - kétszázért pont jó lenne
- Fotók, videók mobillal
-

Mobilarena
Arduino hardverrel és szoftverrel foglakozó téma. Minden mikrovezérlő ami arduinoval programozható, és minden arduino program, board, és hardverrel kapcsolatos kérdések helye.

Új hozzászólás Aktív témák
-
#19591
 Aryes
nagyúr
razorbenke92
#19587
Aryes
nagyúr
razorbenke92
#19587
válasz
 razorbenke92
#19587
üzenetére
razorbenke92
#19587
üzenetére
 De még ha pont ugyanott tartana is mind a műsorban, tehát a puffer tartalma ugyanaz is lenne, akkor is lehet olyan pici eltérés, ami miatt "visszhangos" lesz a lakás.
De még ha pont ugyanott tartana is mind a műsorban, tehát a puffer tartalma ugyanaz is lenne, akkor is lehet olyan pici eltérés, ami miatt "visszhangos" lesz a lakás. 
Ez a HA megoldás érdekesen hangzik. -
#19586
Aryes
nagyúr
razorbenke92
#19585
válasz
razorbenke92
#19585
üzenetére
Az nem baj, hogy nem lesznek szinkronban?
-
#19581
Aryes
nagyúr
Laurencius
#19580
válasz
 Laurencius
#19580
üzenetére
Laurencius
#19580
üzenetére
Egyelőre kipróbálni még nem tudom a javaslatokat, mással van teli az asztalom.
Nekem ez nem probléma.

a képernyő jobbra-balra mozgatása nem egyenértékű-e a képernyő görgetésével
Nem, ha vertikális scroll-ról van szó. Neked horizontális kell.
vajon a korábban jelzett színes kijelző helyet tudnék-e alkalmazni monokróm LCD-t?
Elméletileg nincs akadálya szerintem, a kódban van mód grayscale kijelzőt beállítani, de ha látni is szeretnél rajta (monokróm=1bit színmélység) valamit, akkor ditherelni kell a képet.
-
#19576
Aryes
nagyúr
its_grandpa
#19575
válasz
 its_grandpa
#19575
üzenetére
its_grandpa
#19575
üzenetére
Ebből kéne egy ebook, csak sehol sem találtam.

-
válasz
 gya/352
#19566
üzenetére
gya/352
#19566
üzenetére
Ha máshogy nem, akkor meg kell kínálni kicsit a programot.
![;]](//cdn.rios.hu/dl/s/v1.gif)
Az adó behangolásáért és a lejátszásért felelős kódot addig kell ismételni, amíg a Song stopped incorrectly! hiba jelentkezik. Persze észszerűen: néhány próbálkozás után abbahagyni, különben egy nem létező/hibás link után végtelen ciklusba futna a program. -
-
válasz
lanszelot
#19517
üzenetére
Hát... Akkor már csak két lehetőség van.
1 eleve rossz a lap, vagy hamis chip van rajta
2 véletlenül elkötötted a tápvezetékeket próbálkozás közben és kijött a füst, ami működteti a chipet
Esetleg keresni kellene egy régebbi verziójú avrdudess-t, hátha. Egy régebbi például ismeri a pickit2 programozót, de az újabbakból már kivették a támogatást, hátha az Arduino ISP is csak egy régebbi verzióban van. Én egyszer kaptam attiny85 helyett attiny12-t, de az avrdudess azt is felismerte, asszem pont egy UNO volt a programozó mert nem volt akkor még rendes ISP-m... De hogy semmi ne ismerje fel
-
válasz
lanszelot
#19514
üzenetére
Töltsd le az avrdudess-t. Felül ki tudod választani a portot és a programozót (Arduino as ISP), jobb felső sorban a Detect gombra nyomva fel kell neki ismerni a CPU-t akkor is, ha nincs rá feltöltve bootloader. Ha felismerte, akkor minden jól van összekötve. Töltsd le ezt a hex file-t, tallózd be a Flash sorban, nyomd meg alatta a Gombot
Ha minden jól megy, kész. -
válasz
lanszelot
#19510
üzenetére
Tedd már meg, hogy csinálsz egy fotót az összedugott két lapról, ahogy utoljára próbálkoztál vele.
A mega boardon nem a 10-13 pineken van az SPI, mint az UNO-n meg a Nano-n, hanem az 50-53 pineken, ezeket kell összekötni a Nano 10-13 pinjeivel, vagy az ICSP headerrel, ami ugyanez a 4 láb csak máshol kivezetve. -
válasz
lanszelot
#19501
üzenetére
Na akkor sorban:
1 kiválasztottad a mega boardot
2 feltöltötted rá az Arduino ISP programot
3 kiválasztottad a nano boardot
4 beállítottad programozónak az "Arduino as ISP"-t
5 össze kötötted a megfelelő lábakat:
6 bekötötted a kondenzátort a reset lábraés ennek ellenére sem sikerült?
-
válasz
 Tankblock
#19483
üzenetére
Tankblock
#19483
üzenetére
Nekem az a bajom, hogy az *.ino fájlban csak a setup.h van #include-olva, a setup.h fájlban viszont nincs egyáltalán #include, tehát még mindig nem értem, hogy honnan tudja, hogy melyik library fájlban keresse a meghívott class-okat.
Ha én írok egy *.ino fájlt, hiába van a szükséges library installálva a library mappába, ha nem #include-olom a program elején, nem fogja megtalálni. -
válasz
lanszelot
#19474
üzenetére
Nincs rajta bootloader azt tudom
Csak azt nem mit jelent.Azt jelenti, hogy a rajta lévő usb-uart porton keresztül nem fogsz tudni rá programot feltölteni, csak egy ún. ISP segítségével. Hát, nem jó eszközzel kezded az ismerkedést... Ilyet miért árulnak egyáltalán?
A mostanit azért nem szúrtam be mert rengeteg sor hiba.
paste.bin-re szúrd be és azt linkeld ide. De amúgy amíg nem lesz felprogramozható lapod, addig mindegy is.
Meg tudsz kérni valakit? Esetleg egy Nano-t/UNO-t ha tudsz kölcsön kérni, azzal is életre lehet kelteni.Egyébként a library-knek eléggé meg van szabva a könyvtárszerkezete, ha nem úgy töltöd fel a fájlokat, ahogy az Arduino szereti, akkor előfordulhat, hogy nem találja meg. Egy screenshot kéne a /library könyvtárról.
-
-
válasz
lanszelot
#19469
üzenetére
Nem is kerestem.
Google, első találat: [link]
Második találat:
How to install Adafruit sensor in Arduino?
Open Arduino IDE and go to Sketch, include library, add . zip library and open the . zip file that you have just downloaded. Now theAdafruit Sensor library should be installed. -
válasz
gya/352
#19457
üzenetére
esptool.py -p com4 erase_flash
Ezzel is próbáld meg, ahogy a linkelt oldalon írják.
Próbáltál már különböző memória kiosztásokat (APP/OTA/SPIFFS) beállítani feltöltés előtt?
Az oldalon egyébként írják az okokat is:
SOLVED:
We are now 99% sure this problem is actually caused by a hardware design issue with our USB programming board.
During the condition where the main power supply to the board is OFF but the programmer is still connected to USB, we see stray voltages on the pins connected to the ESP32, including the MTDI pin. This pin has an internal pull down in the ESP, but it is not active until after power is applied. Where it has floated high during power down, it looks like the pin is not pulled low fast enough at power on, and gets read as "1". This causes the VDD_SDIO to be set to 1.8v instead of 3.3v. We observe that the pin strapping shown by the bootloader is 0x33 or 0x3f instead of 0x13. The condition persists a software reboot, and our testers were usually experiencing a recurrence of the problem if they cycled the power. However, reprogramming the board would reset it until some future power interruption caused it to recur.
The problem did not happen on our original boards because the flash still worked correctly even at the lower voltage. However, more recent boards have a later ESP module with a different flash chip (Manufacturer: c8; Device: 4017). I have now confirmed that on these boards, the flash can be read but cannot be written when VDD_SDIO has been set to 1.8v.
I have worked around the problem on our dev boards by running this espefuse command to set the VDD_SDIO to 3.3v via the e-fuses:
CODE:python path\to\esp\tools\espefuse.py -p comX set_flash_voltage 3.3V
Van neked kötve valami az MTDI pin-re (GPIO12)? Ha jól értem egy külső lehúzó ellenállás (pl 10kΩ) esetleg megoldhatja a dolgot.
-
#19454
Aryes
nagyúr
its_grandpa
#19453
válasz
its_grandpa
#19453
üzenetére
Pedig nyugodj végre bele, hogy az csak a buffer size:
String nvsgetstr ( const char* key )
{
static char nvs_buf[NVSBUFSIZE] ; // Buffer for contents
size_t len = NVSBUFSIZE ; // Max length of the string, later real length
nvsopen() ; // Be sure to open nvs
nvs_buf[0] = '\0' ; // Return empty string on error
nvserr = nvs_get_str ( nvshandle, key, nvs_buf, &len ) ;
if ( nvserr )
{
dbgprint ( "nvs_get_str failed %X for key %s, keylen is %d, len is %d!",
nvserr, key, strlen ( key), len ) ;
dbgprint ( "Contents: %s", nvs_buf ) ;
}
return String ( nvs_buf ) ;
} -
#19452
Aryes
nagyúr
its_grandpa
#19449
válasz
its_grandpa
#19449
üzenetére
Nekem sajnos itt megállt a tudományom.
-
válasz
gya/352
#19440
üzenetére
Nem vagyok benne biztos, hogy feltöltés előtt is törli a flash-t, mert a SPIFFS adatai például úgy emlékszem megmaradnak, ha nincs piszkálva. Az NVS is.
Hogy mi triggereli a read only módot, azt kéne megtalálni és megszüntetni, különben flash törlés után újra ugyanez lehet a helyzet.Szerintem első próbálkozásra az NVS-ből kiolvasott információk alapján próbálja elindítani a streamet, azért nem megy, másodikra viszont azt az adatot használja, amit a webes felületen te megadsz.
-
#19439
Aryes
nagyúr
its_grandpa
#19438
válasz
its_grandpa
#19438
üzenetére
Az rendben van:[link]
Szerintem az lesz a megfejtés, amit eggyel előtted linkeltem, az NVS valamitől read only lesz a boot alatt.
-
válasz
gya/352
#19436
üzenetére
Ahogy írtam korábban, az NVS memóriával van valami gubanc:
22:58:11.630 -> D: nvs_get_str failed 1102 for key preset, keylen is 6, len is 150!
22:58:11.630 -> D: Contents:
22:58:11.630 -> D: updateNr 0 <= 0 to 0, relative is 0
22:58:11.630 -> D: updateNr result is 0
22:58:11.630 -> D: nextPreset is 0Valamitől nem lehet bele írni (tartós memória, ide menti a beállításokat).
ESP_ERR_NVS_NOT_FOUND (0x1102): A requested entry couldn’t be found or namespace doesn’t exist yet and mode is NVS_READONLY
[link]Itt találtam rá valamiféle megoldást, most túl fáradt vagyok értelmezni, hátha neked sikerül
-
-
#19416
Aryes
nagyúr
its_grandpa
#19415
válasz
its_grandpa
#19415
üzenetére
Én ehhez nem tudok hozzászólni, csak annyit tudok erről az eszközről, az amit tegnap óta gugliztam róla

A config.h-ban ez volt leírva:
// Define (just one) type of MP3/AAC decoder
#define DEC_VS1053 // Hardware decoder for MP3, AAC, OGG
//#define DEC_VS1003 // Hardware decoder for MP3ezek szerint midit is tudnak, csak azt nem írták oda.
Mindenesetre vicces dolog lehet egy ilyen eszközt rákötni egy midi keyboardra.

-
válasz
 tibi-d
#19410
üzenetére
tibi-d
#19410
üzenetére
anélkül, hogy az egészet kétszer le kéne gépelni.
Persze, CTRL+C, CTRL+V
Persze, ezer féle megoldás lehet rá.
Ha ilyen egyszerű a feladat (csak egy összeadás-kivonás csere), akkor a legegyszerűbb a matematikai megközelítés:
int szorzo=a?-1:1;
c=a+b*szorzo;
d=a+c*szorzo;
e=b+d*szorzo;vagy
c=a+b*(a?-1:1);
d=a+c*(a?-1:1);
e=b+d*(a?-1:1);Ha bonyolultabb, akkor függvénnyel:
int muvelet (bool a, int egyik, int másik) {
return a? egyik-másik : egyik+másik;
}
c= muvelet(a,b,c);
d= muvelet(a,e,f);
e= muvelet(a,x,y);vagy csak beteszed a fenti műveletet a kódba:
c= a? egyik-másik : egyik+másik;
d= a? egyik-másik : egyik+másik;
e= a? egyik-másik : egyik+másik;Vagy ha gyors kódot szeretnél, és keveset gépelni, a kettőt lehet kombinálni, ha függvény helyett makróba teszed azt az egy sornyi kódot:
#define MUVELET( a, egyik, másik) ({ a? egyik-másik : egyik+másik; })
c= MUVELET(a,b,c);
d= MUVELET(a,e,f);
e= MUVELET(a,x,y);vagy
#define SGN(a) ({a?-1:1;})
c=a+b*SGN(a) ;
d=a+c*SGN(a) ;
e=b+d*SGN(a) ; -
#19412
Aryes
nagyúr
its_grandpa
#19411
válasz
its_grandpa
#19411
üzenetére
Ha jól láttam, a VS1003-nak nincs midi módja, mert kizárólag mp3-at tud lejátszani. Ettől függetlenül lehet a firmware-ében ugyanaz a bug, mint a VS1053-nak.
-
#19409
Aryes
nagyúr
Laurencius
#19408
válasz
Laurencius
#19408
üzenetére
Hát, látod kellett hozzá a több szem
de legalább tanultam valami újat én is. -
válasz
gya/352
#19398
üzenetére
Hoppá.
Találtam egy ilyet:Slow SPI, Testing VS1053 read/write registers...
19:04:19.827 -> D: This is not a VS1053, but a VS1003 instead!
19:04:19.938 -> D: Fast SPI, Testing VS1053 read/write registers again...
19:04:21.637 -> D: This is not a VS1053, but a VS1003 instead!A setupban át van ez javítva?
#define DEC_VS1053 // Hardware decoder for MP3, AAC, OGG
//#define DEC_VS1003Bár a log szerint így is felismeri, de hátha.
-
#19396
Aryes
nagyúr
Laurencius
#19390
válasz
Laurencius
#19390
üzenetére
Próbáld már ki, hogy az ExampleTftBufferedCameraFrame.cpp fájlban ezt a részt módosítod:
void sendLineToDisplay() {
if (screenLineIndex > 0) {
screenLineStart();
#if GRAYSCALE_PIXELS == 1
for (uint16_t i=0; i<camera.getLineLength(); i++) {
sendPixelByte(graysScaleTableHigh[camera.getPixelByte(i)]);
sendPixelByte(graysScaleTableLow[camera.getPixelByte(i)]);
}
#else
for (uint16_t i=0; i<byteCountForDisplay; i++) {
sendPixelByte(camera.getPixelByte(i));
}
#endif
screenLineEnd();
}
}úgy, hogy a for (uint16_t i=0; sorokban a 0-t átírod például 20-ra! Ez elvileg a képet 20 pixellel balra fogja tolni. Ha ez működik, akkor lehet tovább lépni.
-
Ilyenkor jövök rá, mennyire csak a felszínét piszkálgatom én ennek az egésznek...

Honnan a fenéből tudja, hogy mivel kell összelinkelődni, ha a setup.h-ba nincs include-olva és még csak nem is egy könyvtárban vannak?
Arról nem is beszélve, hogy pl az initializeScreenAndCamera() 6 fájlban fordul elő, de ezek közül egyik sem a library-ben fordul elő, hanem example fájlok:
-
#19391
Aryes
nagyúr
Laurencius
#19390
válasz
Laurencius
#19390
üzenetére
Ez nekem magas, remélem valaki el tudja nekem magyarázni, hogy hogy tud lefordulni ez a gyakorlatilag üres fájl...
-
#19389
Aryes
nagyúr
Laurencius
#19388
válasz
Laurencius
#19388
üzenetére
Mármint hogy ezt?
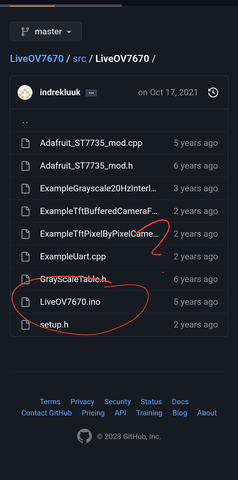
A github oldal megvolt eddig is, csak nem értem, hogy ez az *.ino fájl hogy kerül lefordításra, mert hogy nincs benne egyetlen #include sem... -
válasz
gya/352
#19386
üzenetére
Nagy dolog nem lehet, mert alapvetően működik a cucc.
Vannak különböző memóriasémák, abban a menüben ahol a lapot kiválasztod, meg a portot stb. Ki tudod választani, hogy mennyi legyen az app, az OTA, és a SPIFFS. Ha nem szeretnéd OTA frissíteni a firmware-t, azt ki is lehet hagyni. Próbálj végig többféle sémát, hátha ott van a kutya elásva.A kódot megnézve elég beszédes debug ügyben. Tedd már meg, hogy nem csak a hiba jelentkezése utáni debug szöveget, hanem bekapcsolástól az összes kiírást (a hiba jelentkezéséig, illetve az első sikeres lejátszásig) lemented a terminálról mondjuk ide hogy meg tudjuk nézni.
-
válasz
gya/352
#19384
üzenetére
A routerre vonatkozó kérdést már másodszor ugrod át elegánsan...
Feltöltéskor milyen memóriamodellt választottál ki? Úgy tűnik az adatok tartós tárolása hibádzik valahol. Viszont a kezelő felület html része is a SPIFFS-ben van tárolva, és az működik, tehát SPIFFS van.
-
válasz
gya/352
#19378
üzenetére
Volt már téma korábban.
Anélkül, hogy beleásnám magam a szoftver részébe: ha azzal gond lenne, annak valószínűleg nyoma lenne a github oldalon az issues fülön, de nincs. Tehát valószínűleg hardveres gond lehet. Elsősorban a táp résszel lehet valami gubanc: milyen tápot kap az egész cucc és külön-külön az összetevők?
Ha az rendben van, akkor az összeköttetés az esp és az mp3 modul közt (rövidzár, laza forrasztás, esetleg külső zavar). És nem tudom, hogy a router, amire az egész kapcsolódik, volt-e már újraindítva, de az is tud problémát okozni. -
#19373
Aryes
nagyúr
Laurencius
#19372
válasz
Laurencius
#19372
üzenetére
Tedd már meg, hogy belinkeled, hogy pontosan mit és honnan töltesz/fordítasz (*.ino fájlt), mert ilyen zavaros github oldalt még nem láttam.
Mit nyersz egyébként a kép mozgatásával? -
válasz
 ekkold
#19363
üzenetére
ekkold
#19363
üzenetére
Mert az ARM ismeri a lebegőpontos műveleteket, az AVR meg nem.
Mikor csináltam az oszcilloszkópomat (UNO), ciklusidőre ki volt számolva a program, és a lefordított asm alapján faragtam le további értékes μs-okat meg pontosítottam az időzítéseket. Akkor láttam, hogy milyen ügyes optimalizációkat csinál a fordító. -
válasz
ekkold
#19361
üzenetére
Esetleg még érdekességképpen annyit, hogy ha egy feltételt többször is meg kell vizsgálni (pl.: if(feltétel1 && feltétel2)
...
if(feltétel1 && feltétel3)
...) akkor előzetesen a feltétel1 vizsgálatának az eredményét érdemes egy változóba menteni, mert azt tudja úgy optimalizálni a fordító, hogy a processzor egyik regiszterét használja cache-nek (a lassabb RAM művelet helyett) és így magát a vizsgálatot is csak egyszer végzi el. -
#19348
Aryes
nagyúr
razorbenke92
#19347
válasz
razorbenke92
#19347
üzenetére
Mindig tanul az ember

-
#19343
Aryes
nagyúr
razorbenke92
#19342
válasz
razorbenke92
#19342
üzenetére
Az atmega tartalmaz egy beépített feszültségreferencia adót, ami kvázi egy ultrapici 1.1V stabkocka
...
Ha megméred az internal vref feszültségét, abból vissza tudsz skálázni a tápfeszre.Ezt meg lehet csinálni? Hogy? Úgy tudom a beépített 1.1V feszültséget csak referenciaként lehet használni analóg méréshez, de azt magát nem lehet megmérni. 🤔
-
#19341
Aryes
nagyúr
Harcipocok84
#19340
válasz
 Harcipocok84
#19340
üzenetére
Harcipocok84
#19340
üzenetére
Azért ne ess kétségbe, nem áll meg itt a tudomány.

Meg lehet ezt kvázi bolondbiztosra is csinálni.
Tegyél egy nagy kondenzátort a táp és a gnd közé, a kondenzátor elé nyitó irányban pedig egy schottky diódát.
Az egyik szabad analóg pinre kösd rá a tápfeszültséget a dióda előtti részről egy áramkorlátozó ellenálláson keresztül. Az 5V tápot osztás nélkül rá tudod kötni, az ellenállás azért kell, hogy bekapcsoláskor ne azon keresztül töltődjön a kondi.
Minden EEPROM írás előtt nézd meg, hogy kap-e még (kívülről) megfelelő tápot a cucc. Ha elég nagy kondit teszel oda, a tápfesz elvétele után még akár pár másodpercig is képes üzemelni, így biztonságosan le tudod állítani. Ez a véletlen brownout-okat is ki tudja küszöbölni (bizonyos szintig), de a megoldás igazából az lenne, ha stabil tápot kapna és nem kapcsolgatná ki senki random módon, ha már fontos automatizált folyamatot vezérel.
-
válasz
tibi-d
#19338
üzenetére
Nem a timert állítod le, csak letiltod az interruptot. Annyi mellékhatása lehet, hogy egy interrupt kicsivel később fog kiváltódni, mert két flag egyszerre szükséges hozzá: a timer interrupt és az interrupts enabled. A timer lefutásával beállítja az interrupt flag-et, az úgy is marad, amíg a másikat újra nem engedélyezed.
Ha a timert az interrupton belül inicializálod, akkor értelemszerűen onnantól annyival el lesz csúszva. -
#19329
Aryes
nagyúr
Harcipocok84
#19328
válasz
Harcipocok84
#19328
üzenetére
Szia! Ha ez egyedi eset volt, akkor bármi lehet. Az EEPROM írás viszonylag hosszú művelet, az is lehet, hogy éppen akkor áramtalanítottad, mikor írt volna, és még egy korábbi értéket kaptál vissza.
Az is lehet, hogy az egyik cella egyik bitje elérte a maximális írási mennyiséget és csendben elromlott. Talán 10ezer írást bír egy ilyen EEPROM cella, te tudod, hányszor írtál bele. Próbáld a hibát reprodukálni, ha tudod melyik cella volt. -
válasz
 #68216320
#19323
üzenetére
#68216320
#19323
üzenetére
Kell egy darab nyáklap, amire alkoholos tűfilccel rárajzolod az érintkezőket méretarányosan, és valaki kimaratja neked. Szerintem csak akad itt a topikban is valaki helybeli, aki sörért/csokiért segít.
Utána valószínűleg le kell csiszolni a másik oldalát, hogy ne legyen vastagabb, mint egy microSD kártya. -
-
Megnéztem, nagyon jó kis kezdő szett annak, aki nem szeretne forrasztással bíbelődni, csak plug-and-play.
Sajnos semmilyen részletet nem ír az alkatrészekről, de a motor a videó alapján talán a nagyobbik (1:120) áttételű lehet. Én mégis azt mondom, hogy pont neked való lenne. -
Na, összeszedtem pár javasolt alkatrészt kifejezetten smart car témában:
UNO/Mega kompatibilis cuccok:
TB6612 Mosfet Stepper Motor PCA9685 Standard IIC I2C PWM Servo Driver Shield V2 For Arduino Robot PWM Mega R3 Replace L293D
[link]
Én ilyet használok a mega boarddal, de akkor még nem volt ennyire drága Előnye, hogy van rajta egy kisebb proto pcb, ahová fel lehet forrasztani kisebb dolgokat, kijelzőt, LED-eket.
Előnye, hogy van rajta egy kisebb proto pcb, ahová fel lehet forrasztani kisebb dolgokat, kijelzőt, LED-eket.2Pcs 1:120 electric TT Motor Durable Dual Shaft DC 3V ~ 9V DC Geared Motor for Robot Toys Smart Car Replace DIY Kit
[link]
Ahogy írtam, egy vonalkövető robothoz jobb a lassú motor, mert hiába lehet PWM-mel szabályozni, de bizonyos kitöltés alatt nem mozdul meg, csak zúg.Optokapu az encoderhez (a kerék sebességét lehet vele mérni):
[link]Reflektív opto, ütközés/közelségérzékeléshez:
[link]Vonalkövetéshez nem kifejezetten alkalmas, oda színes LED + fototranzisztor kell, ilyet készen most nem találtam, az enyémen sincs amúgy, de lenne rá igény
I2c RGB szenzort találtam, de a vonalkövetéshez legjobb 3-5 szenzort egymás mellé tenni, a vonal vastagságától függő távolságban. Ezt egyszerűbb és olcsóbb otthon legyártani.Bluetooth modul:
[link]
A HC06 csak vevő, telefonnal lehet párosítani, a HC05 az master-ként is tud működni, saját távirányítót lehet belőle építeni.D1 mini/ESP kompatibilis cuccok:
360 fokos szervó
[link]A hangsúly a 360fok / folyamatosan körbe forgó (continuous) tulajdonságon van, ezek át vannak alakítva, hogy ne csak oda-vissza tudjon forogni, hanem folyamatosan is. Nem kell hozzá driver, a fentihez még kereket is adnak.
D1 mini motor shield
[link]
Ha mégis DC motort szeretnél használni (janos250 linkelt egy kis méretű motort, ami jó hozzá).Ha majd még eszembe jut valami, megírom.
-
válasz
 Janos250
#19298
üzenetére
Janos250
#19298
üzenetére
Asszem pont a felső volt az alap az enyémhez is.
A hozzá adott két motor nem az igazi, túl kicsi az 1:48 áttétel. 1:120 áttételes motorokra kellett cserélnem, mert túl gyors volt a mozgás, nem lehetett finoman irányítani.
Nem adtak résoptót se az encoderhez, külön kellett rendelnem hozzá. -
-
válasz
Janos250
#19291
üzenetére
A smart car link nekem nem működik!
Igen, jumper kábel és breadboard mindenképp kell a teszteléshez, vannak kisebb méretű, beépíthető breadboard-ok is, amit a kocsira lehet rögzíteni és azon dugdosni a szenzorokat forrasztás nélkül.
A legtöbb alkatrész, amit írtál, kísérletezéshez jó, smart car-hoz annyira nem kellenek 😄
-
Ha van D1 mini, azzal is el lehet indulni, sőt, kimondottan pici, akár tenyérnyi "autót" lehet építeni belőle, csak hasonlóan pici motorok kellenek hozzá. Az egyszerű DC motorok helyett lehet például 360 fokos szervó motorokat is használni, ha kimondottan a méret a lényeg! Előnye, hogy a driver és az áttétel is már bele van építve, ráadásul jól szerelhető. Hátránya, hogy kicsit nehezebben irányítható, rá kell érezni.
-
válasz
 Wolfram
#19276
üzenetére
Wolfram
#19276
üzenetére
Én szögegyszerű törhető/vágható, egy soros IC foglalatot (0.1" tűsor/hüvelysor), ha kell, forrótakonnyal körbenyomva, hogy ne törjenek el a forrasztások a használat során. Nem szép, de legalább
csúnyamegbízhatóan működik. Ki szoktam hagyni egy pint valahol, hogy egyértelmű legyen, milyen irányból kell bedugni (poka-yoke).


 De szerintem a belső DAC is alkalmas lenne a feladatra, ha megfelelően van programozva.
De szerintem a belső DAC is alkalmas lenne a feladatra, ha megfelelően van programozva.







![;]](http://cdn.rios.hu/dl/s/v1.gif)









 Csak ne kelljen mindent kétszer-háromszor megkérdezni vagy leírni mert telefonról írok és elég fárasztó
Csak ne kelljen mindent kétszer-háromszor megkérdezni vagy leírni mert telefonról írok és elég fárasztó 














 Előnye, hogy van rajta egy kisebb proto pcb, ahová fel lehet forrasztani kisebb dolgokat, kijelzőt, LED-eket.
Előnye, hogy van rajta egy kisebb proto pcb, ahová fel lehet forrasztani kisebb dolgokat, kijelzőt, LED-eket.
Új hozzászólás Aktív témák

- DELL Latitude 5310 13.3" FHD 2in1 Touchscreen laptop I5-10310U 16G/512G Win11 Pro, Üzletből, 27%ÁFÁs
- XIAOMI Redmi Note 14 Pro 5G 8/256
- POINT S WINTER S 185/65R15 88T téligumi acélfelnivel
- ThinkPad 15,6",core i3 6100u(4x2,3Ghz)IntelHD VGA,8-16GB RAM,240SSD,Jó akku,nagyon szép állapot
- 12700kf,RTX4060 8gb,32gb ddr5,6T m.2 ssd,stb .Új komplett középkategóriás gamer pc .
- MacBook felvásárlás!! MacBook, MacBook Air, MacBook Pro
- HIBÁTLAN iPhone 11 Pro 256GB Space Grey -1 ÉV GARANCIA - Kártyafüggetlen, MS3173, 100% Akkumulátor
- BESZÁMÍTÁS! ASRock B450M R5 5500 16GB DDR4 512GB SSD Strix RTX 2070 8GB Rampage SHIVA ADATA 600W
- Apple iPhone 12 64GB, Kártyafüggetlen, 1 Év Garanciával
- Eredeti Lenovo 300W töltők - ADL300SDC3A
Állásajánlatok

Cég: NetGo.hu Kft.
Város: Gödöllő

Cég: Laptopműhely Bt.
Város: Budapest