- iPhone topik
- Mobil flották
- Samsung Galaxy S23 Ultra - non plus ultra
- Samsung Galaxy Watch (Tizen és Wear OS) ingyenes számlapok, kupon kódok
- Apple iPhone 15 Pro Max - Attack on Titan
- Nokia 3210 - felélni az örökséget
- Magisk
- Yettel topik
- Redmi Note 11 és 11S - biztos alapra jobb építeni
- Huawei Watch Fit 3 - zöldalma
Hirdetés
-


The Witcher - Befutott a TV sorozat folytatásának első rövid kedvcsinálója
gp A legújabb videóban rövid ideig láthatjuk végre Liam Hemsworth Geraltját is.
-


Bugfix van, magyarázat nincs az iOS-ben újra feltűnő, korábban törölt fotókra
ma Megjelent az iOS 17.5.1, ami javítja a furcsa hibát, de az Apple hallgat a miértről és a hogyanról.
-


Elhozná az olcsó önvezető autók korát az Xpeng
it Gyümölcsöző az Xpeng kutatás-fejlesztési részlegének munkája, a Volkswagennel való együttműködés. Az Xpeng négyes szintű önvezetésre és olcsó önvezető EV-kre készül.






-

Mobilarena
Arduino hardverrel és szoftverrel foglakozó téma. Minden mikrovezérlő ami arduinoval programozható, és minden arduino program, board, és hardverrel kapcsolatos kérdések helye.

Új hozzászólás Aktív témák
-
válasz
 Janos250
#10639
üzenetére
Janos250
#10639
üzenetére
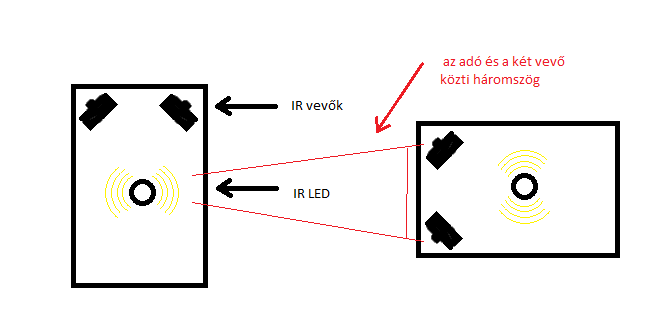
Egy nagyon vázlatos rajz:
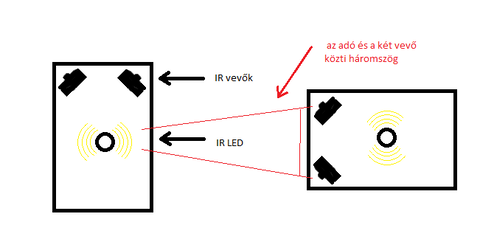
Az IR led bizonyos időközönként kiküld egy 1-2 byte-os beacon üzenetet, amit vagy látnak a körülötte lévő robotok, vagy nem, az üzenet tartalma pedig a robot azonosító száma, és egyéb rendszerüzenetek, pl. lövés (ez utóbbi üzenet csak egy dedikált, irányított LED-ből fog érkezni, vagyis csak az fogja látni, akit "eltalál" vele).
Ezt az üzenetet több különböző teljesítményen (pl 5mA - 100mA) szándékozok küldeni egymás után, ami reményeim szerint csak bizonyos távolságokból látható (pl az 1-es erősségű jel csak 20cm-ről, az 5-ös erősségű meg mondjuk 3 méterről), ebből a vevő robot egy hozzávetőleges távolsági becslést fog tudni számolni az alapján, hogy melyik infra vevő melyik jelet fogta. Az üzenetben természetesen benne lesz, hogy milyen erősséggel lett kiküldve. Példa: "15" <- az 1-es számú robot 5-ös erősségű beacon jele.
Nem kell se a távolságot, se az irányt pontosan tudni, elég, ha annyit tud az egyik robot, hogy a másik előtte van, vagy tőle jobbra, közel, közepesen távol, vagy valahol messze.
Mondjuk egy ilyen koordináta rendszerben: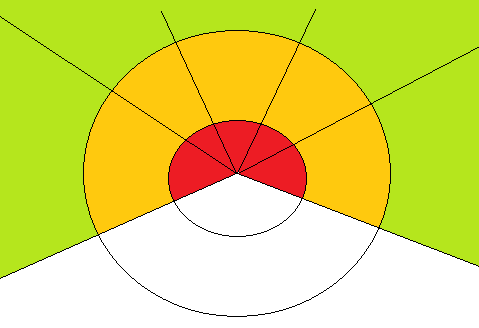
A piros a közel, a zöld a távol, a többi meg látszik a rajzon.Amit most leírtam, pontosan ezt tudja a Lego Spybotics robot, 76kHz-es IR vevőkkel és ledekkel. Azt szeretném lemásolni.



Új hozzászólás Aktív témák
 ekkold
ekkold
Állásajánlatok

Cég: Alpha Laptopszerviz Kft.
Város: Pécs

Cég: Ozeki Kft.
Város: Debrecen